Chapter 4.3 — Basis (বেসিস — ভিত্তি): Vector জগতের ঠিকানা-ব্যবস্থা¶
🎯 এই chapter-এ যা শিখবে¶
- Basis(বেসিস) আসলে কি — এক লাইনে: vector space-এর জন্য একটা নিখুঁত ঠিকানা-ব্যবস্থা (address system)
- Basis কোথায় থাকে — \(R^2\)-এর গ্রিডে, \(R^3\)-এর plane-এ, এমনকি polynomial-দের জগতেও
- Basis কেন লাগে — abstract vector-কে সংখ্যার column বানানোর একমাত্র বৈধ উপায়
- Uniqueness theorem: basis-এ প্রতিটি vector-এর ঠিকানা exactly একটা — না কম, না বেশি
- Coordinates বের করার হাতে-কলমে ও NumPy পদ্ধতি: basis matrix-এর system solve
🖼️ এক ছবিতে মূল idea¶
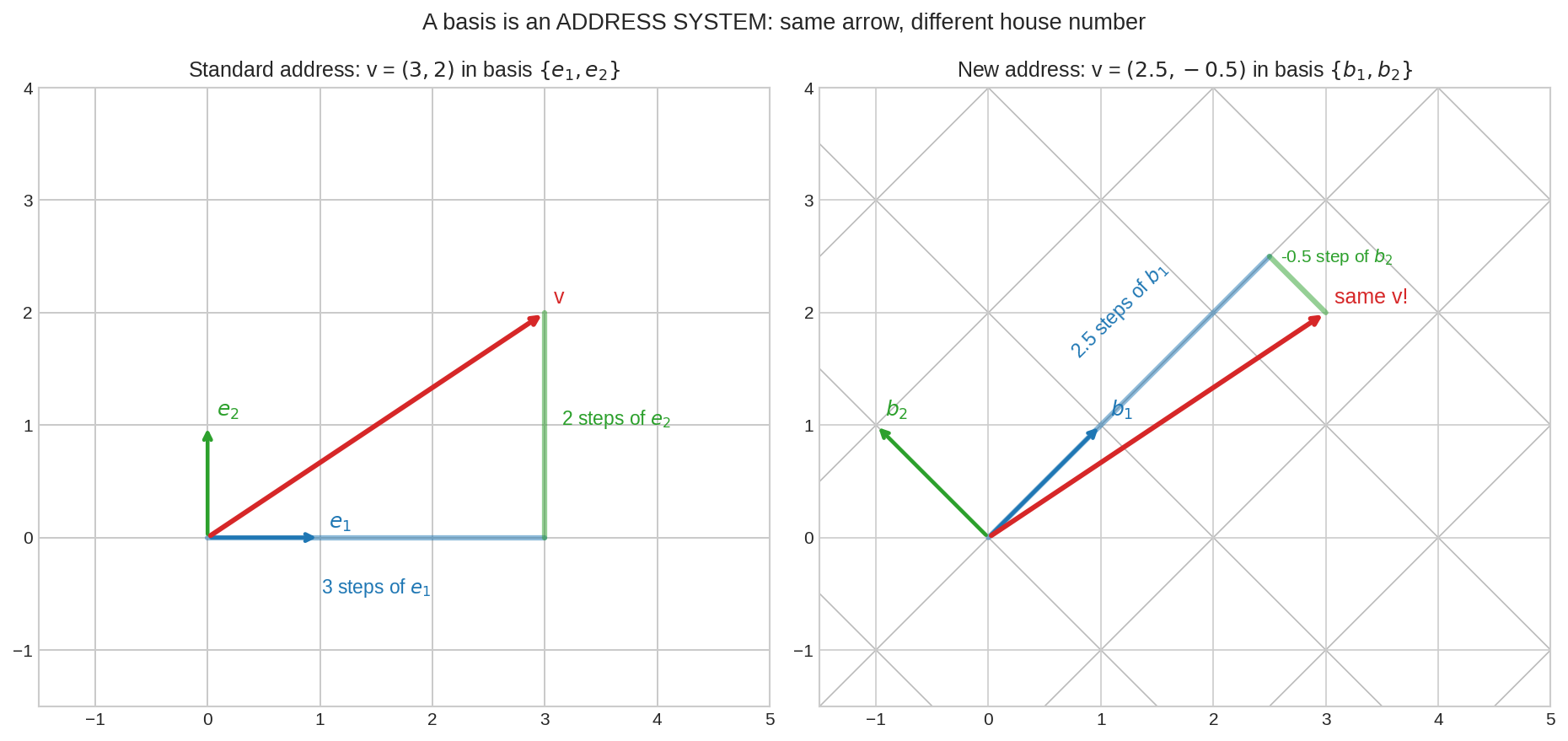
একই লাল arrow \(v\)। বাঁয়ে standard গ্রিডে তার ঠিকানা \((3, 2)\); ডানে অন্য একটা গ্রিডে ঠিকানা \((2.5, -0.5)\)। Arrow বদলায়নি এক চুলও — বদলেছে শুধু ঠিকানা লেখার ভাষা। এই ভাষাটার নামই basis।
১. কি? (What)¶
শুরু করি একদম চেনা জিনিস থেকে¶
Part I-এর প্রথম দিন থেকে তুমি লিখে আসছ \(v = (3, 2)\)। কখনো কি ভেবেছ — এই "৩ আর ২" সংখ্যা দুটো আসলে কীসের ৩ আর ২?
উত্তর: এরা নির্দেশ। \((3, 2)\) মানে আসলে:
— "পূর্ব দিকে (\(e_1\)) ৩ ধাপ, তারপর উত্তর দিকে (\(e_2\)) ২ ধাপ।" অর্থাৎ সংখ্যাগুলোর অর্থই দাঁড়ায় না যতক্ষণ না পেছনে দুটো reference vector ধরা থাকে। এতদিন \(e_1, e_2\) এত স্বাভাবিক ছিল যে তাদের অস্তিত্বই চোখে পড়েনি — যেমন মাছ পানিকে দেখে না।
দৈনন্দিন analogy: বাসার ঠিকানা¶
ঢাকায় কাউকে বাসা চেনাতে বলো: "মিরপুর রোড ধরে ৩ কিমি, তারপর ডানে গলিতে ২০০ মিটার।" এখানে "মিরপুর রোড" আর "ডানের গলি" হলো তোমার reference direction — আর \((৩ \text{ কিমি}, ২০০ \text{ মি})\) হলো ঐ reference-এ বাসার ঠিকানা। অন্য কেউ হয়তো বলবে: "সাত মসজিদ রোড ধরে ২ কিমি, বাঁয়ে ৫০০ মিটার" — একই বাসা, ভিন্ন reference, ভিন্ন সংখ্যা।
একটা ভালো ঠিকানা-ব্যবস্থার দুটো শর্ত:
- সব বাসায় পৌঁছানো যেতে হবে — কোনো বাসা যেন ব্যবস্থার বাইরে না থাকে ⟶ গণিতের ভাষায়: reference vector-রা পুরো space span করবে (Chapter 4.1)
- প্রতি বাসার ঠিকানা একটাই হতে হবে — এক বাসার দুই ঠিকানা মানেই চিঠি বিভ্রাট ⟶ গণিতের ভাষায়: reference vector-রা linearly independent হবে (Chapter 4.2)
এই দুই শর্ত মেলালেই পাওয়া যায় basis।
সংজ্ঞা: Basis
Vector space \(V\)-এর একটি set \(B = \{b_1, b_2, \ldots, b_n\}\)-কে \(V\)-এর Basis(বেসিস) বলা হয় যদি:
- \(\operatorname{span}(B) = V\) — \(B\)-এর linear combination দিয়ে \(V\)-এর সব vector বানানো যায়, এবং
- \(B\) linearly independent — দলে কোনো redundant সদস্য নেই।
সংজ্ঞা: Coordinates
\(B = (b_1, \ldots, b_n)\) একটি (ক্রম-ঠিক-করা) basis হলে, \(v = c_1 b_1 + \cdots + c_n b_n\) লেখার scalar-গুলোকে বলে \(B\) basis-এ \(v\)-এর coordinates(স্থানাঙ্ক), লেখা হয়:
সবচেয়ে গুরুত্বপূর্ণ theorem: ঠিকানা একটাই¶
Uniqueness Theorem
\(B = \{b_1, \ldots, b_n\}\) যদি \(V\)-এর basis হয়, তবে প্রতিটি \(v \in V\)-কে exactly এক ভাবে লেখা যায়:
প্রমাণ (ছোট্ট আর সুন্দর): span-ধর্ম বলে অন্তত এক রকমে লেখা যায়। ধরো দুই রকমে লেখা গেল:
বিয়োগ করো:
কিন্তু \(B\) independent — শূন্য বানানোর একমাত্র রেসিপি সব coefficient শূন্য! তাই \(c_i = d_i\) সব \(i\)-তে। \(\blacksquare\)
দেখো কেমন করে দুই শর্ত দুই দিক সামলায়: span ⟹ ঠিকানা আছে, independence ⟹ ঠিকানা একটার বেশি নয়।
২. দেখতে কেমন? (কোথায় থাকে?)¶
Goldilocks-এর গল্প: কম, ঠিকঠাক, বেশি¶
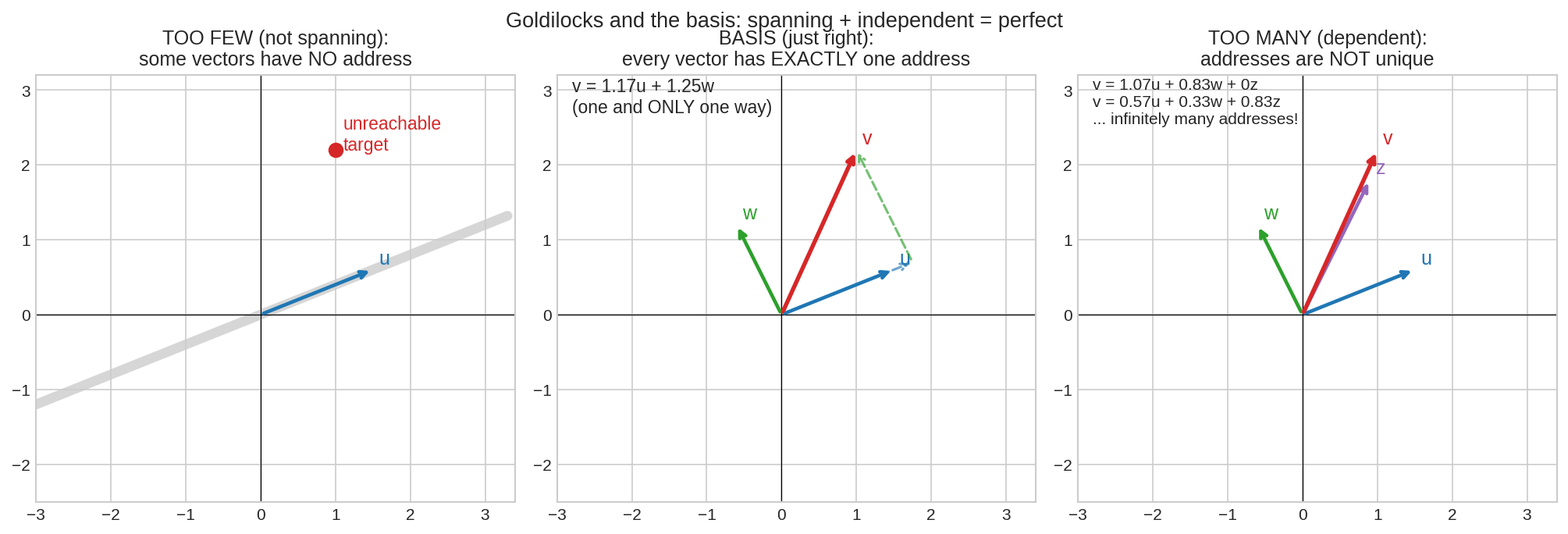
বাঁয়ে ১টা vector — plane-এর অধিকাংশ বাসায় পৌঁছানোই যায় না (span করে না)। মাঝে ২টা independent vector — প্রতিটি বাসার ঠিকানা exactly একটা: এটাই basis। ডানে ৩টা vector — পৌঁছানো যায় সবখানে, কিন্তু ঠিকানা অগণিত (dependent দল)। Basis মানে ঠিক মাঝের অবস্থা — না কম, না বেশি।
Basis কোথায় কোথায় থাকে?¶
\(R^2\)-তে: যেকোনো দুটো অসমান্তরাল vector-ই একটা basis! \(\{e_1, e_2\}\) হলো standard basis — কিন্তু \(\{(1,1), (-1,1)\}\), \(\{(2,1), (1,3)\}\) — সবাই সমান বৈধ। অর্থাৎ basis একটা নয়, অগণিত; আমরা সুবিধামতো বেছে নিই।
\(R^3\)-এর subspace-এ: একটা plane (subspace)-এর নিজস্ব basis লাগে মাত্র ২টা vector — plane-এর ভেতরের যেকোনো দুটো অসমান্তরাল vector।
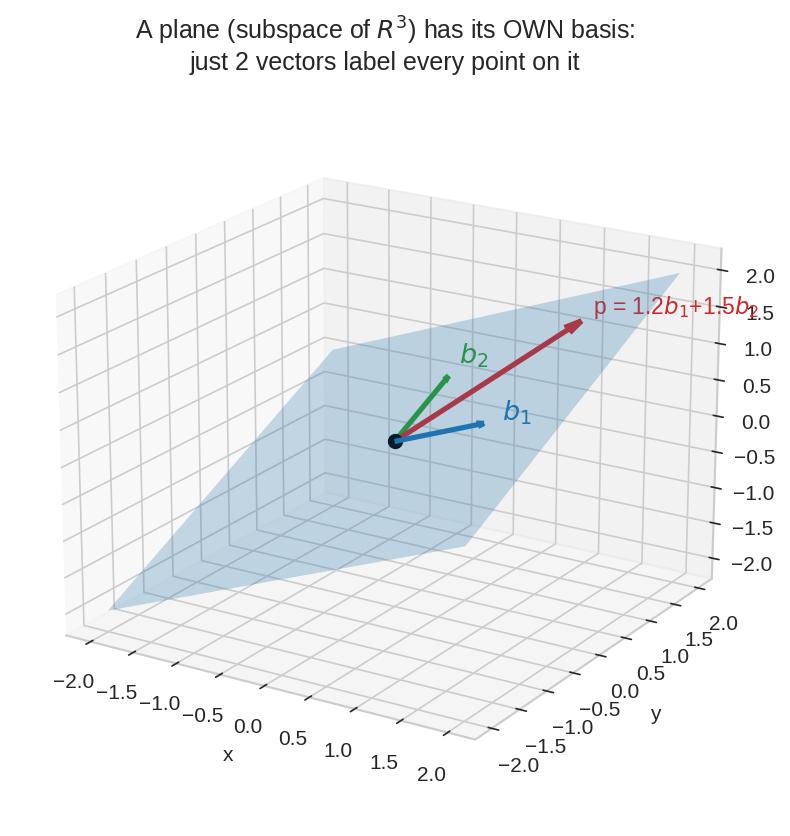
\(R^3\)-এর ভেতরের plane — তার বাসিন্দাদের ঠিকানা দিতে ৩টা সংখ্যা লাগে না, লাগে মাত্র ২টা: \(p = 1.2b_1 + 1.5b_2\), অর্থাৎ plane-এর নিজের ভাষায় \([p]_B = (1.2, 1.5)\)। Subspace-রা নিজস্ব, ছোট ঠিকানা-ব্যবস্থা চালায়!
Polynomial-দের জগতে: \(P_2\)-এর standard basis \(\{1, t, t^2\}\) — তিনটা "দিক"। যেকোনো \(p(t) = a_0 + a_1 t + a_2 t^2\) মানেই coordinates \((a_0, a_1, a_2)\)।
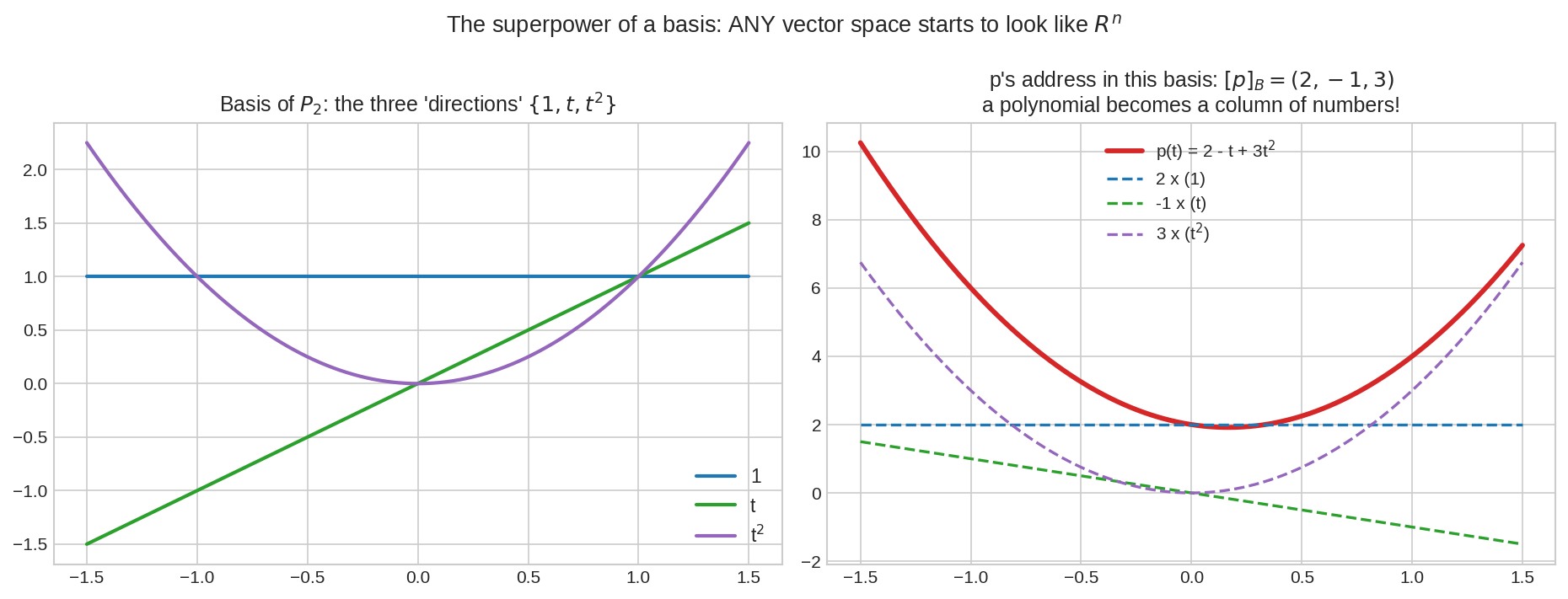
বাঁয়ে \(P_2\)-এর তিন basis-দিক: \(1\), \(t\), \(t^2\)। ডানে \(p(t) = 2 - t + 3t^2\) ভেঙে দেখানো — তার ঠিকানা \([p]_B = (2, -1, 3)\)। একটা polynomial সংখ্যার column হয়ে গেল — এটাই basis-এর জাদু।
৩. কোথায় ইউজ হয়? (কেন লাগে?)¶
Basis ছাড়া computation-ই অসম্ভব — কারণ computer শুধু সংখ্যার list বোঝে, abstract vector বোঝে না:
- প্রতিবার
np.array([3, 2])লেখা মানেই basis ব্যবহার: NumPy-র প্রতিটা array আসলে standard basis-এ লেখা coordinates। Basis-এর চুক্তিটা অদৃশ্যভাবে সব সময় আছে। - JPEG compression: ছবিকে pixel basis-এ না রেখে cosine wave basis-এ (DCT) লিখলে অধিকাংশ coordinate প্রায় শূন্য — ফেলে দিলেই ফাইল ছোট! ভালো basis বাছাই = compression। Chapter 4.4-এর notebook-এ এর প্রথম ধাপ নিজে বানাবে।
- Word embeddings (NLP): প্রতিটা শব্দ ৩০০-মাত্রার vector — কোন basis-এ? Model-এর শেখা একটা basis-এ, যেখানে দিকগুলোর অর্থ দাঁড়িয়ে যায় (লিঙ্গ-দিক, বহুবচন-দিক...)।
- PCA (Part VI): data নিজেই বলে দেয় তার জন্য সবচেয়ে "সৎ" basis কোনটা — সেই দিকগুলো, যেদিকে ছড়িয়ে আছে বেশি। PCA মানে আর কিছুই না: data-র পছন্দের basis-এ চশমা বদলানো।
- Fourier analysis: শব্দতরঙ্গকে sine/cosine basis-এ লিখলে "কোন সুর কতটা" পড়া যায় — music app-এর equalizer এই coordinates-ই দেখায়।
- Quantum computing পর্যন্ত: qubit-এর \(|0\rangle, |1\rangle\) হলো একটা basis; measurement মানে এক basis-এর coordinates জানা।
মোদ্দা কথা: যেখানেই "representation" শব্দটা শুনবে, সেখানেই কোনো না কোনো basis কাজ করছে।
৪. Properties¶
Property 1: Basis মানেই সংখ্যায় অনুবাদ (the coordinate isomorphism)¶
Basis \(B\) ঠিক হলে \(v \mapsto [v]_B\) একটা নিখুঁত অনুবাদ-যন্ত্র: যোগ থাকে যোগ, scale থাকে scale:
মিনি-derivation: \(u = \sum c_i b_i\), \(v = \sum d_i b_i\) হলে \(u + v = \sum (c_i + d_i) b_i\) — আর uniqueness বলছে এটাই একমাত্র লেখা, তাই coordinates যোগ হয়। ফলাফল: \(n\)টা basis vector-ওয়ালা যেকোনো space আসলে \(R^n\)-এর ছদ্মবেশ।
Property 2: Coordinates বের করা = linear system solve¶
\(R^n\)-এ \(B = \{b_1, \ldots, b_n\}\) আর টার্গেট \(v\) দেওয়া থাকলে, coordinates \(c\) পাওয়ার সমীকরণ:
Part II-এর Gaussian elimination আর Part III-এর inverse — দুই পুরনো বন্ধুই এখানে ফিরে এলো।
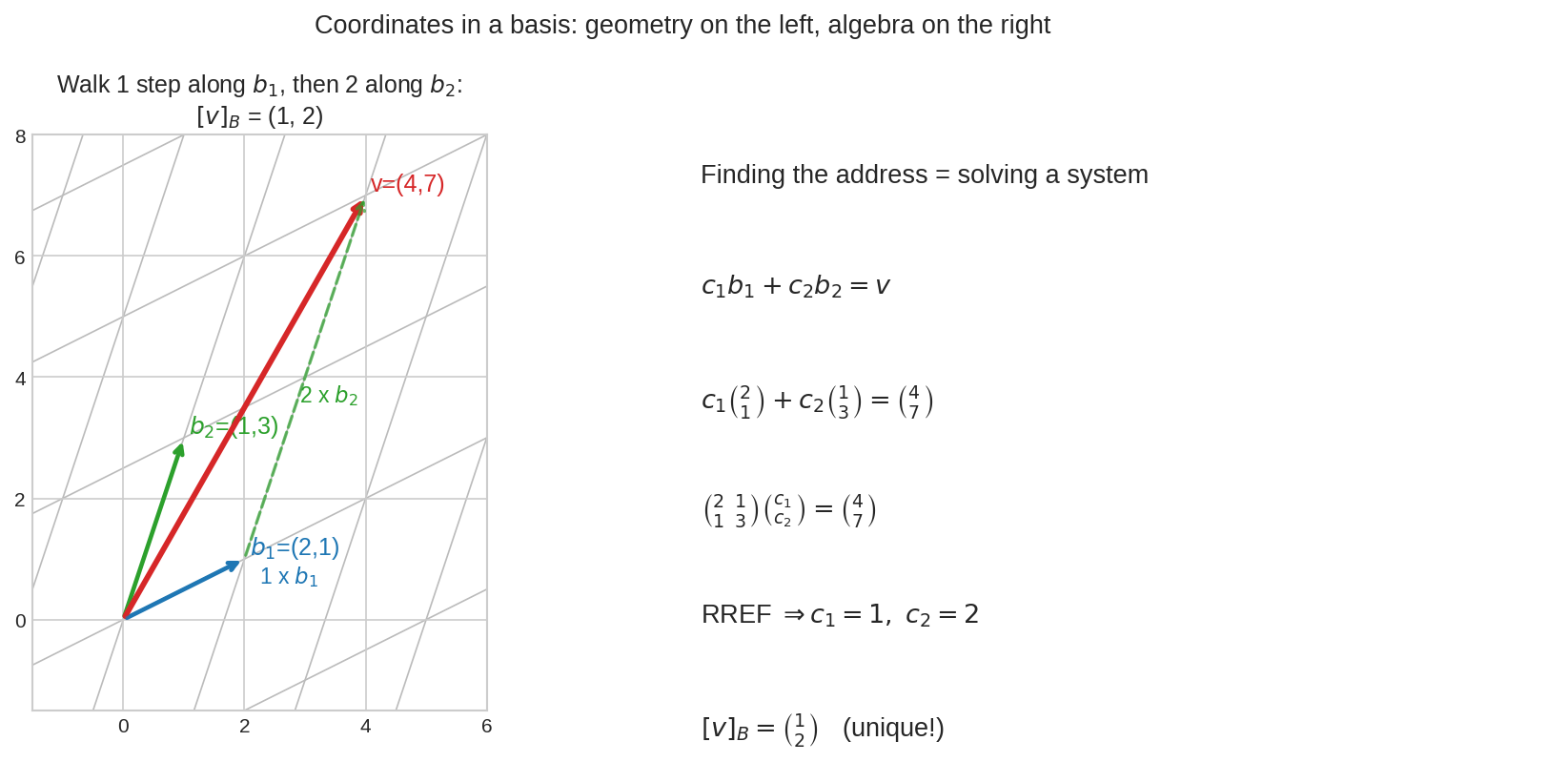
বাঁয়ে জ্যামিতি: \(b_1\) ধরে ১ ধাপ, \(b_2\) ধরে ২ ধাপ — পৌঁছে গেলে \(v = (4,7)\)-এ। ডানে একই কথা algebra-য়: \(2 \times 2\) system solve করে \([v]_B = (1, 2)\)।
Property 3: \(R^n\)-এ basis চেনার দ্রুত পরীক্ষা¶
\(R^n\)-এ ঠিক \(n\)টা vector \(\{b_1, \ldots, b_n\}\) basis \(\iff\) matrix \(P = (b_1 \cdots b_n)\) invertible \(\iff \det P \ne 0\) \(\iff\) RREF-এ \(n\)টা pivot। অর্থাৎ Chapter 4.2-এর determinant test এখানে basis-test-ও বটে। (আর সংখ্যা \(n\)টা না হলে? \(n\)-এর কম হলে span হবে না, বেশি হলে independent হবে না — পরের chapter-এ প্রমাণ।)
Property 4: Basis বদলালে coordinates বদলায় — vector নয়¶
Opening figure-এ দেখেছ: একই \(v\)-এর ঠিকানা এক গ্রিডে \((3,2)\), অন্যটায় \((2.5, -0.5)\)। Vector হলো বাসা; coordinates হলো ঠিকানার কাগজ। কাগজ বদলালে বাসা নড়ে না। এই idea-র পূর্ণ যন্ত্রপাতি (change of basis matrix) পরের chapter-এ।
Property 5: Standard basis-এর বিশেষত্ব শুধু আলস্য¶
\(\{e_1, \ldots, e_n\}\)-এর একমাত্র মাহাত্ম্য: এতে coordinates বের করতে কোনো কাজই করতে হয় না — \(v = (3, 2)\)-এর standard coordinates \((3,2)\)-ই। গণিতের চোখে সে আর দশটা basis-এর মতোই একজন; কাজের চোখে সে "default ভাষা"।
৫. Intuition — কেন সত্য?¶
এক মিনিটের thought experiment (3Blue1Brown ঢঙে): কল্পনা করো, তোমার বন্ধু অন্য এক গ্রিডে পৃথিবী দেখে — তার গ্রাফ পেপারের লাইনগুলো তোমার চোখে বাঁকা। তুমি একটা arrow-কে বলো \((3, 2)\); সে একই arrow-কে বলে \((2.5, -0.5)\)। কে ঠিক? দুজনেই। Arrow-টা ভাষা-নিরপেক্ষ সত্য; সংখ্যাগুলো ভাষা-সাপেক্ষ বর্ণনা। Basis হলো সেই ভাষার অভিধান — আর linear algebra-র অর্ধেক শক্তি আসে এই স্বাধীনতা থেকে: আমরা প্রশ্ন অনুযায়ী সবচেয়ে সুবিধার ভাষা বেছে নিতে পারি।
কেন ঠিক দুই শর্ত — span আর independence? আবার ঠিকানা-ব্যবস্থায় ফেরো:
- Span না করলে? শহরের কিছু বাসার ঠিকানাই লেখা যায় না — ডাকব্যবস্থা অচল। (fig 2-এর বাম ছবি: টার্গেট বিন্দু line-এর বাইরে, পৌঁছানোর উপায় নেই।)
- Independent না হলে? এক বাসার অগণিত ঠিকানা — কোন চিঠি কোথায় যাবে? (fig 2-এর ডান ছবি।) তার চেয়েও খারাপ: দুটো ঠিকানা দেখতে আলাদা হলেও একই বাসা কি না বলা যায় না — তুলনা করার ক্ষমতাই হারায়।
গভীরতর point — কেন এটা linear algebra-র কেন্দ্রীয় ধারণা: Chapter 4.1-এ কষ্ট করে শিখলে vector মানে polynomial, function, matrix — যা খুশি। Basis সেই abstract জগৎ থেকে ফেরার টিকিট: basis বাছো, অমনি প্রতিটা abstract vector একটা সংখ্যা-column হয়ে যায়, প্রতিটা linear প্রশ্ন Part II-এর system-solving হয়ে যায়। Abstract-এ ভাবো (একবার প্রমাণ, সর্বত্র খাটে), concrete-এ গণনা করো (RREF, NumPy) — এই দুই জগতের সেতুর নামই basis। Guest বই এক লাইনে বলে: "bases allow us to convert abstract vectors into column vectors."
৬. Code-এ কেমনে লিখে¶
Basis যাচাই + coordinates বের করা + ফেরত যাওয়া — পুরো চক্র:
import numpy as np
import matplotlib.pyplot as plt
np.random.seed(42)
# ---- ধাপ ১: প্রস্তাবিত basis (columns) ----
b1 = np.array([2.0, 1.0])
b2 = np.array([1.0, 3.0])
P = np.column_stack([b1, b2]) # basis matrix
# basis কি? determinant test (Property 3)
print("det(P) =", np.linalg.det(P)) # 5.0 != 0 -> সত্যিই basis
# ---- ধাপ ২: coordinates বের করা: P c = v solve ----
v = np.array([4.0, 7.0])
c = np.linalg.solve(P, v) # [v]_B
print("[v]_B =", c) # [1. 2.]
# ---- ধাপ ৩: coordinates থেকে vector-এ ফেরা ----
v_back = P @ c # c1*b1 + c2*b2
print("reconstructed v =", v_back) # [4. 7.]
# ---- ধাপ ৪: ছবি — দুই ভাষায় একই vector ----
fig, ax = plt.subplots(figsize=(6, 6))
for vec, col, lab in [(b1, "#1f77b4", "b1"), (b2, "#2ca02c", "b2"),
(v, "#d62728", "v")]:
ax.annotate("", xy=vec, xytext=(0, 0),
arrowprops=dict(arrowstyle="->", lw=2, color=col))
ax.text(*vec, " " + lab, color=col, fontsize=12)
# নির্মাণ-পথ: 1*b1, তারপর +2*b2
ax.plot([0, b1[0]], [0, b1[1]], "--", color="#1f77b4", alpha=0.5)
ax.plot([b1[0], v[0]], [b1[1], v[1]], "--", color="#2ca02c", alpha=0.5)
ax.set_xlim(-1, 6); ax.set_ylim(-1, 8); ax.grid(True)
ax.set_title("v = 1*b1 + 2*b2 => [v]_B = (1, 2)")
plt.savefig("basis_demo.png", dpi=150, bbox_inches="tight")
print("figure saved")
Output:
det(P) = 5.000000000000001
[v]_B = [1. 2.]
reconstructed v = [4. 7.]
figure saved
ব্যাখ্যা: np.linalg.solve(P, v) — এই এক লাইনই "নতুন ভাষায় ঠিকানা কত?" প্রশ্নের উত্তর, আর P @ c হলো উল্টো অনুবাদ। লক্ষ করো \((4,7)\) আর \((1,2)\) — দুটো column-ই একই vector, শুধু দুই ভাষায়। Determinant \(5 \ne 0\) আগে চেক করেছি বলেই solve নিরাপদ ছিল।
৭. Worked Examples¶
Example 1: \(\{(1,1), (1,-1)\}\) কি \(R^2\)-এর basis? হলে \(v = (5, 1)\)-এর coordinates কত?¶
ধাপ ১ (basis test): \(P = \begin{pmatrix} 1 & 1 \\ 1 & -1 \end{pmatrix}\), \(\det P = -1 - 1 = -2 \ne 0\) ✓ basis।
ধাপ ২ (system): চাই \(c_1(1,1) + c_2(1,-1) = (5,1)\):
ধাপ ৩ (solve): যোগ করলে \(2c_1 = 6 \Rightarrow c_1 = 3\); তাহলে \(c_2 = 2\)।
উত্তর: \([v]_B = (3, 2)\)। যাচাই: \(3(1,1) + 2(1,-1) = (3+2,\; 3-2) = (5, 1)\) ✓
Example 2: Plane subspace-এর basis¶
\(W = \{(x, y, z) : x - y + z = 0\} \subset R^3\)-এর একটা basis বের করো।
ধাপ ১: সমীকরণ solve করো: \(x = y - z\), যেখানে \(y, z\) free। তাই সাধারণ সদস্য:
ধাপ ২: কাজেই \(W = \operatorname{span}\{(1,1,0), (-1,0,1)\}\) — span শর্ত ✓
ধাপ ৩ (independence): \(c_1(1,1,0) + c_2(-1,0,1) = 0\) দিলে দ্বিতীয় component: \(c_1 = 0\), তৃতীয়: \(c_2 = 0\) ✓
উত্তর: \(B = \{(1, 1, 0), (-1, 0, 1)\}\) — plane-টার ২-vector-এর নিজস্ব ঠিকানা-ব্যবস্থা। (অন্য উত্তরও ঠিক হতে পারে — basis অগণিত!) লক্ষ করো free variable-প্রতি একটা basis vector — Part II-এর solution set-এর গঠনই আসলে basis খোঁজা ছিল!
Example 3: Polynomial জগতে coordinates¶
\(P_2\)-এর basis \(B = \{1, t, t^2\}\)-তে \(p(t) = (t + 1)^2 + 3\)-এর coordinates কত? আর \(B' = \{1, (t-1), (t-1)^2\}\)-তে?
\(B\)-তে: বিস্তার করো: \(p(t) = t^2 + 2t + 1 + 3 = 4 + 2t + t^2\)। তাই \([p]_B = (4, 2, 1)\)।
\(B'\)-তে: লিখতে চাই \(p(t) = c_0 + c_1(t-1) + c_2(t-1)^2\)। \(s = t - 1\) বসাও, তাহলে \(t = s+1\):
তাই \([p]_{B'} = (7, 4, 1)\)।
দেখো: একই polynomial, দুই basis-এ দুই ঠিকানা — \((4,2,1)\) বনাম \((7,4,1)\)। Taylor expansion-ও আসলে "\(\{1, (t-a), (t-a)^2, \ldots\}\) basis-এ function-এর coordinates" — calculus আর linear algebra হাত মেলাল!
৮. Problems ও Solutions¶
Problem 1. কোনগুলো \(R^2\)-এর basis? (ক) \(\{(2,1), (3,2)\}\) (খ) \(\{(1,2), (2,4)\}\) (গ) \(\{(1,0), (0,1), (1,1)\}\) (ঘ) \(\{(5,0)\}\)
Solution
(ক) \(\det\begin{pmatrix}2&3\\1&2\end{pmatrix} = 4 - 3 = 1 \ne 0\) — basis ✓ (খ) \((2,4) = 2(1,2)\) — dependent, \(\det = 0\) — basis নয় (span-ও করে না: শুধু একটা line)। (গ) ৩টা vector \(R^2\)-তে — Chapter 4.2-এর Property 3 মতে dependent হতেই হবে — basis নয় (span করে, কিন্তু ঠিকানা unique নয়)। (ঘ) ১টা vector — শুধু \(x\)-axis span করে, \((0,1)\)-এ পৌঁছানো যায় না — basis নয়। শিক্ষা: \(R^2\)-এর basis-এ সদস্য ঠিক ২ জন লাগবেই — আর তারপর শুধু independence চেক।
Problem 2. \(B = \{(1, 2), (2, 1)\}\) basis-এ (ক) \(v = (4, 5)\)-এর coordinates বের করো। (খ) কোন vector-এর \(B\)-coordinates \((1, -1)\)?
Solution
(ক) Solve করো \(c_1(1,2) + c_2(2,1) = (4,5)\):
প্রথমটাকে ২ দিয়ে গুণ করে বিয়োগ: \(3c_2 = 3 \Rightarrow c_2 = 1\), তাই \(c_1 = 2\)। \([v]_B = (2, 1)\)। যাচাই: \(2(1,2) + 1(2,1) = (4, 5)\) ✓ (খ) এবার উল্টো দিক — শুধু combination বানাও:
লক্ষ করো দুই দিকের অসমতা: coordinates→vector হলো সোজা গুণ (\(Pc\)), vector→coordinates হলো system solve (\(P^{-1}v\))।
Problem 3. দেখাও যে \(B = \{1 + t,\; 1 - t\}\) polynomial space \(P_1\)-এর একটি basis, এবং \(p(t) = 3 + 5t\)-এর \([p]_B\) বের করো।
Solution
Independence: \(c_1(1+t) + c_2(1-t) = 0 \Rightarrow (c_1 + c_2) + (c_1 - c_2)t = 0\)। Coefficient শূন্য: \(c_1 + c_2 = 0\) এবং \(c_1 - c_2 = 0\) — যোগ করলে \(c_1 = 0\), তাই \(c_2 = 0\) ✓ Span: যেকোনো \(a + bt\)-এর জন্য চাই \(c_1 + c_2 = a\), \(c_1 - c_2 = b\) — সমাধান \(c_1 = \frac{a+b}{2}\), \(c_2 = \frac{a-b}{2}\) সবসময় আছে ✓ কাজেই basis। Coordinates: \(a = 3, b = 5\): \(c_1 = \frac{3+5}{2} = 4\), \(c_2 = \frac{3-5}{2} = -1\)।
Problem 4. \(U = \{(x, y, z) \in R^3 : x + y + z = 0\}\)-এর একটি basis বের করো এবং প্রমাণ করো তোমার উত্তর সত্যিই basis।
Solution
Free variable পদ্ধতি: \(x = -y - z\), তাই সাধারণ সদস্য
প্রস্তাবিত basis: \(B = \{(-1,1,0), (-1,0,1)\}\)। Span: উপরের বিশ্লেষণই দেখায় প্রতিটি সদস্য এদের combination ✓ Independence: \(c_1(-1,1,0) + c_2(-1,0,1) = 0\) — দ্বিতীয় component দেয় \(c_1 = 0\), তৃতীয় দেয় \(c_2 = 0\) ✓ কাজেই \(U\)-এর basis; \(U\) একটি ২-মাত্রিক plane (dimension-এর ভাষা আসছে পরের chapter-এ)।
Problem 5. সত্য/মিথ্যা: "\(R^3\)-এর যেকোনো ৩টি ভিন্ন ভিন্ন অশূন্য vector একটি basis।" প্রমাণ বা counterexample দাও।
Solution
মিথ্যা। সংখ্যা ঠিক থাকলেই হয় না — independence লাগবে। Counterexample: \((1,0,0), (0,1,0), (1,1,0)\) — তিনটাই ভিন্ন, অশূন্য, কিন্তু তৃতীয়টা প্রথম দুটার যোগফল (dependent)। এরা \(xy\)-plane-এই আটকে — \((0,0,1)\)-কে কখনো বানাতে পারবে না, তাই span-ও করে না।
Problem 6. \(B = \{b_1, b_2\}\) basis-এ vector \(u, v\)-এর coordinates \([u]_B = (2, 1)\), \([v]_B = (-1, 3)\)। Coordinates-এর হিসাবেই (basis vector না জেনে!) \([2u + v]_B\) বের করো, আর ব্যাখ্যা করো কোন property এটা সম্ভব করল।
Solution
Property 1 (coordinate map-এর linearity):
যেটা সম্ভব করল: basis fix করলে vector-দের যোগ/scale আর coordinates-দের যোগ/scale হুবহু একই কাজ — এই translation-এ কোনো তথ্য হারায় না। এই জন্যই computer-এ abstract vector নিয়ে কাজ করা যায়: আমরা আসলে সবসময় coordinates নিয়েই কাজ করি।
Problem 7. \(R^2\)-এর এমন একটি basis \(\{b_1, b_2\}\) দাও যেখানে \(v = (4, 2)\)-এর coordinates হয় \((2, 2)\)। উত্তর কি অনন্য?
Solution
চাই \(2b_1 + 2b_2 = (4, 2)\), অর্থাৎ \(b_1 + b_2 = (2, 1)\) — আর \(b_1, b_2\) independent। একটা উত্তর: \(b_1 = (1, 0)\), \(b_2 = (1, 1)\): যোগফল \((2,1)\) ✓, \(\det\begin{pmatrix}1&1\\0&1\end{pmatrix} = 1 \ne 0\) ✓। অনন্য নয়! \(b_1 = (2, 0), b_2 = (0, 1)\)-ও চলে: \(2(2,0) + 2(0,1) = (4,2)\) ✓, independent ✓। শর্ত মেনে অগণিত basis বানানো যায় — এক শর্তে অজানা চারটা (\(b_1, b_2\)-এর component), সমীকরণ মাত্র দুটো। শিক্ষা: "কোন basis-এ কি ঠিকানা হবে" এই খেলায় আমাদের হাতে বিরাট স্বাধীনতা — সেই স্বাধীনতাই পরের chapter-গুলোতে কৌশলে ব্যবহার করব।
Problem 8 (challenge). \(\{u, v\}\) যদি \(R^2\)-এর basis হয়, প্রমাণ করো \(\{u + v,\; u - v\}\)-ও basis।
Solution
Independence: ধরো \(c_1(u + v) + c_2(u - v) = 0\)। সাজাও:
\(\{u, v\}\) independent, তাই \(c_1 + c_2 = 0\) এবং \(c_1 - c_2 = 0\) — যোগ করলে \(2c_1 = 0 \Rightarrow c_1 = 0 \Rightarrow c_2 = 0\) ✓ Span: যেকোনো \(w = au + bv\) (কারণ \(\{u,v\}\) span করে)-কে লেখা যায়:
— বিস্তার করলেই মিলবে ✓। কাজেই \(\{u+v, u-v\}\) basis। \(\blacksquare\) (এটা Problem 3-এর general রূপ — সেখানে \(u = 1, v = t\) ছিল। একই প্রমাণ arrow আর polynomial দুই জগতে খাটল — Chapter 4.1-এর প্রতিশ্রুতি রক্ষা হলো!)
৯. Common ভুল¶
| ❌ ভুল ধারণা | ✅ ঠিক ধারণা |
|---|---|
| "Basis মানে \(\{e_1, e_2, \ldots\}\) — ওটাই একমাত্র" | Standard basis অগণিত basis-এর একটা মাত্র; যেকোনো \(n\)টা independent vector \(R^n\)-এর basis |
| "Vector বদলে গেল, কারণ coordinates বদলেছে" | Vector অপরিবর্তিত; বদলেছে শুধু বর্ণনার ভাষা — বাসা এক, ঠিকানার কাগজ ভিন্ন |
| "\((3, 2)\) — এটাই vector" | \((3,2)\) হলো কোনো basis-এ (সচরাচর standard) লেখা coordinates; চুক্তিটা উহ্য থাকে বলে ভুলটা হয় |
| "Span করলেই basis" | Span + independence দুটোই লাগবে; শুধু span হলে ঠিকানা অগণিত হয়ে যায় |
| "Coordinates বের করা মানে \(b_1, b_2\)-এর সাথে dot product" | সাধারণ basis-এ নয — লাগবে system solve (\(P^{-1}v\)); dot product shortcut শুধু orthonormal basis-এ খাটে (Part V-এ আসছে) |
১০. এক নজরে¶
| ধারণা | এক লাইনে |
|---|---|
| Basis | Span + independent — vector space-এর নিখুঁত ঠিকানা-ব্যবস্থা |
| Coordinates \([v]_B\) | \(v = c_1b_1 + \cdots + c_nb_n\)-এর সেই অনন্য \(c\)-column |
| Uniqueness theorem | Basis-এ প্রতিটি vector-এর ঠিকানা exactly একটা |
| বের করার নিয়ম | \(P = (b_1 \cdots b_n)\), তারপর \([v]_B = P^{-1}v\); ফেরা: \(v = P[v]_B\) |
| \(R^n\)-এ চেনার test | ঠিক \(n\)টা vector + \(\det P \ne 0\) |
| কেন দরকার | Abstract vector ⟶ সংখ্যার column; সব linear প্রশ্ন ⟶ system solving |
| বড় সত্য | Basis অগণিত — প্রশ্ন বুঝে সুবিধারটা বেছে নেওয়াই দক্ষতা |
পরের chapter-এর সেতু: সব basis-এ সদস্যসংখ্যা কি একই হয়? (এতক্ষণের উদাহরণে তাই মনে হচ্ছে — \(R^2\)-তে সবসময় ২টা, \(P_2\)-তে ৩টা...) উত্তর হ্যাঁ — আর সেই অভিন্ন সংখ্যাটার নামই Dimension। সাথে শিখব এক basis থেকে আরেক basis-এ যাওয়ার যন্ত্র — change of basis matrix — চশমা বদলানোর পুরো কারিগরি। Chapter 4.4-এ চলো।
📓 Notebook Project¶
notebooks/part-04/ch03-project.ipynb — নিজের হাতে "Basis Explorer" বানাবে: basis যাচাইকারী function, যেকোনো basis-এ coordinates বের করা ও ফেরত আসা, non-orthogonal গ্রিড আঁকা, আর polynomial-কে column vector বানানোর অনুবাদ-যন্ত্র।