Chapter 4.1 — Vector Space ও Subspace (ভেক্টর স্পেস ও সাবস্পেস)¶
🎯 এই chapter-এ যা শিখবে¶
- \(R^3\)-এর ভেতরে লুকিয়ে থাকা "ছোট জগৎ" — origin দিয়ে যাওয়া plane আর line — থেকে শুরু করে Vector Space(ভেক্টর স্পেস)-এর formal সংজ্ঞা পর্যন্ত পৌঁছাবে
- Vector space-এর ১০টি axiom(স্বতঃসিদ্ধ) কেন লেখা হয়েছে আর সেগুলোর প্রত্যেকটার মানে কি
- Subspace(সাবস্পেস) চেনার সহজ ৩-ধাপ test — আর Subspace Theorem দিয়ে সেটা এক লাইনে নামিয়ে আনা
- কোনগুলো vector space নয় — first quadrant, unit circle, origin-বিহীন line — আর ঠিক কোন axiom-এ এরা fail করে
- Polynomial, function, matrix — arrow ছাড়া অন্য জিনিসও কীভাবে "vector" হয়ে যায়
🖼️ এক ছবিতে মূল idea¶
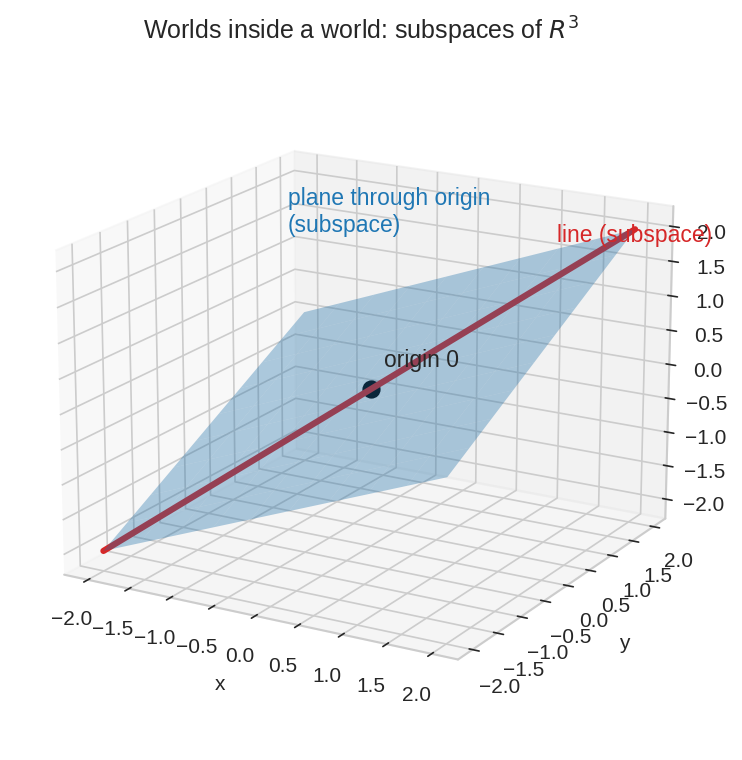
\(R^3\) একটা বিশাল জগৎ — আর তার ভেতরে origin দিয়ে যাওয়া একটা plane এবং একটা line নিজেরাই এক-একটা ছোট, স্বয়ংসম্পূর্ণ জগৎ। এই "জগতের ভেতরে জগৎ" ধারণাটাই আজকের chapter-এর প্রাণ।
১. কি? (What)¶
আগে concrete ছবি, তারপর abstract কথা¶
Part I–III জুড়ে তুমি vector নিয়ে কাজ করেছ — arrow আঁকা, যোগ করা, matrix দিয়ে ঘোরানো। সব কাজ হয়েছে \(R^2\) বা \(R^3\)-এ। এবার একটা প্রশ্ন করি:
\(R^3\)-এর ভেতরে \(z = 0\) plane-টার (মানে xy-plane) দিকে তাকাও। এই plane-এর দুটো vector নাও, যোগ করো — ফলাফল কি plane-এর ভেতরেই থাকে?
দেখো: \((1, 2, 0) + (3, -1, 0) = (4, 1, 0)\) — তৃতীয় component এখনও \(0\), মানে ফলাফল plane-এর ভেতরেই। কোনো vector-কে \(5\) দিয়ে গুণ করলে? \(5 \cdot (1, 2, 0) = (5, 10, 0)\) — এখনও ভেতরে!
অর্থাৎ xy-plane একটা বদ্ধ ঘর: যোগ আর scalar গুণ — এই দুই দরজা দিয়ে যতই আসা-যাওয়া করো, ঘরের বাইরে যেতে পারবে না। ঠিক এই ধর্মটাকেই গণিতবিদরা নাম দিয়েছেন closure(ক্লোজার — বদ্ধতা)।
দৈনন্দিন analogy: ক্লাবের সদস্যপদ¶
একটা ক্লাব ভাবো যার নিয়ম হলো — দুই সদস্য মিলে যা-ই বানাক (যোগ), সেটাও ক্লাবের সদস্য; কোনো সদস্যকে যত গুণ বড়/ছোট/উল্টো করা হোক (scalar multiplication), ফলাফলও সদস্য। এমন "নিয়ম-মানা ক্লাব"-ই হলো vector space। আর বড় ক্লাবের ভেতরে ছোট একটা দল যদি নিজেও একই নিয়ম মানে, সেই দলটা হলো subspace।
Formal সংজ্ঞা¶
এবার abstract সংজ্ঞা — কিন্তু মনে রেখো, প্রতিটা লাইনের পেছনে উপরের plane-এর ছবিটাই আছে।
সংজ্ঞা: Vector Space
একটি Vector Space(ভেক্টর স্পেস) \((V, +, \cdot, R)\) হলো একটি set \(V\), সাথে দুটি operation — vector addition \(+\) এবং scalar multiplication \(\cdot\) — যারা সব \(u, v, w \in V\) এবং সব \(c, d \in R\)-এর জন্য নিচের ১০টি নিয়ম মানে:
যোগের ৫ নিয়ম:
- Additive Closure: \(u + v \in V\) — দুই vector যোগ করলে vector-ই পাওয়া যায়, ক্লাবের বাইরে যায় না
- Commutativity: \(u + v = v + u\) — যোগের ক্রম বদলালে কিছু আসে-যায় না
- Associativity: \((u + v) + w = u + (v + w)\) — বন্ধনী যেখানেই দাও, ফল এক
- Zero vector: এমন একটি বিশেষ vector \(0_V \in V\) আছে যার জন্য \(u + 0_V = u\) — "কিছুই না করা" সদস্য
- Additive Inverse: প্রতিটি \(u\)-এর জন্য এমন \(w\) আছে যেন \(u + w = 0_V\) — প্রত্যেকের একটা "উল্টো" আছে
Scalar গুণের ৫ নিয়ম:
- Multiplicative Closure: \(c \cdot v \in V\) — scale করলেও ক্লাবেই থাকে
- Distributivity (scalar): \((c + d) \cdot v = c \cdot v + d \cdot v\)
- Distributivity (vector): \(c \cdot (u + v) = c \cdot u + c \cdot v\)
- Associativity: \((cd) \cdot v = c \cdot (d \cdot v)\)
- Unity: \(1 \cdot v = v\) — \(1\) দিয়ে গুণ করলে কিছু বদলায় না
দশটা নিয়ম দেখে ভয় পেয়ো না। আসল কথা মাত্র এক লাইন:
Vector space হলো এমন একটা set, যা addition আর scalar multiplication-এর অধীনে বদ্ধ (closed) — বাকি ৮টা নিয়ম শুধু নিশ্চিত করে যে যোগ-গুণ "ভদ্রভাবে" আচরণ করে।
সংজ্ঞা: Subspace
Vector space \(V\)-এর একটি subset \(U \subseteq V\)-কে Subspace(সাবস্পেস) বলা হয়, যদি \(V\) থেকে পাওয়া (inherited) addition ও scalar multiplication-এর অধীনে \(U\) নিজেই একটি vector space হয়।
Subspace Theorem — ১০টা চেক নয়, মাত্র ১টা¶
সুখবর: subset-এর জন্য ১০টা axiom আলাদা করে চেক করতে হয় না। Commutativity, associativity — এগুলো বড় space \(V\) থেকে এমনিতেই উত্তরাধিকারসূত্রে চলে আসে। যা চেক করতে হয় তা শুধু "ঘর থেকে পালিয়ে যাচ্ছে না তো?"
Subspace Theorem
\(V\)-এর একটি non-empty subset \(U\) একটি subspace হবে যদি এবং কেবল যদি — যেকোনো \(u_1, u_2 \in U\) এবং যেকোনো scalar \(\mu, \nu \in R\)-এর জন্য
অর্থাৎ: \(U\)-এর ভেতরের যেকোনো linear combination আবার \(U\)-তেই থাকতে হবে।
বাস্তবে আমরা এটা তিন ধাপে চেক করি:
- Zero check: \(0 \in U\)? (না থাকলে সঙ্গে সঙ্গে বাতিল — এটা দ্রুততম test)
- Addition check: \(u, v \in U \Rightarrow u + v \in U\)?
- Scaling check: \(u \in U, c \in R \Rightarrow cu \in U\)?
২. দেখতে কেমন?¶
Subspace test-এর ছবি¶
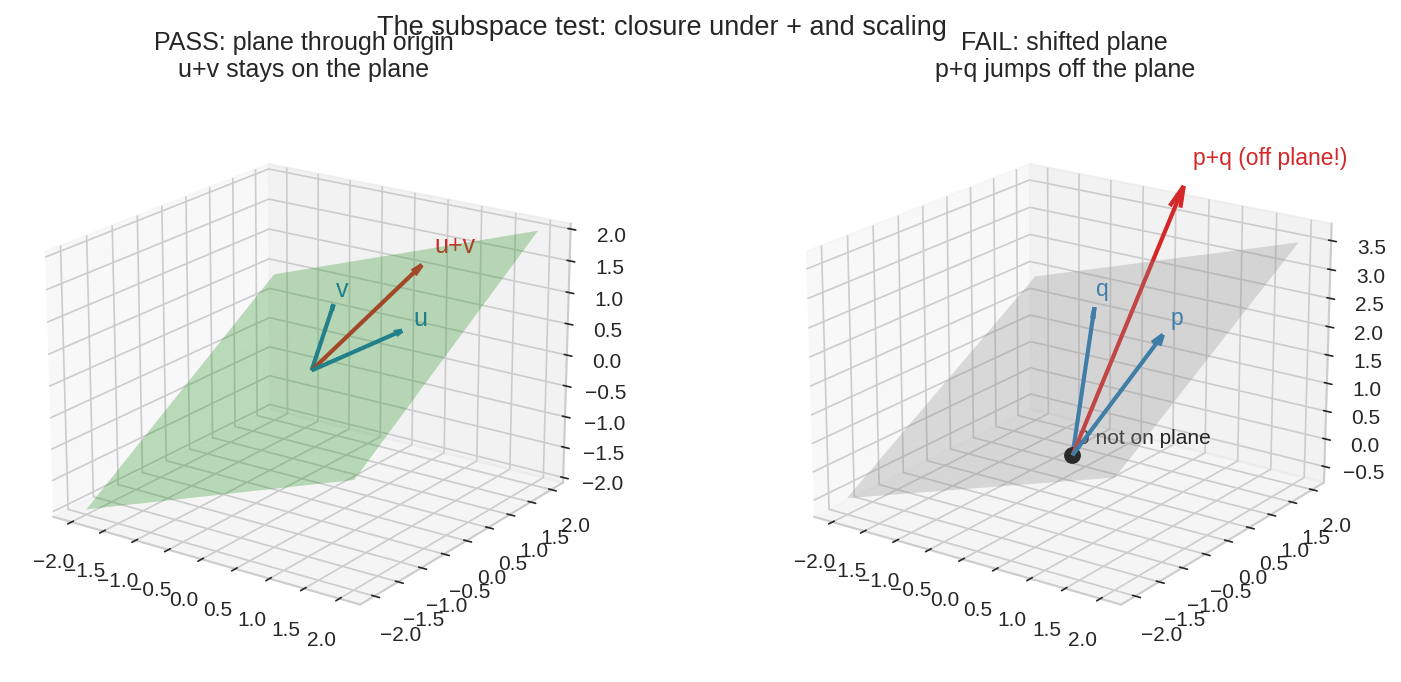
বামে: origin দিয়ে যাওয়া plane — দুই vector-এর যোগফল plane-এই থেকে যায় (PASS)। ডানে: উপরে সরানো plane — \(p + q\) লাফ দিয়ে plane-এর বাইরে চলে যায়, আর origin তো plane-এ নেই-ই (FAIL)।
\(R^3\)-এর সব subspace-এর পূর্ণ তালিকা আসলে খুবই ছোট — এটা মুখস্থ রাখার মতো সুন্দর:
| Subspace | দেখতে কেমন | "সাইজ" (পরের chapter-গুলোর ভাষায় dimension) |
|---|---|---|
| \(\{0\}\) | শুধু origin বিন্দুটা | 0 |
| Origin দিয়ে যাওয়া line | সরলরেখা | 1 |
| Origin দিয়ে যাওয়া plane | সমতল | 2 |
| পুরো \(R^3\) | সব কিছু | 3 |
ব্যস, আর কিছু নেই। বাঁকা surface, গোলক, সরানো plane — কোনোটাই subspace না।
Non-example-দের ছবি¶
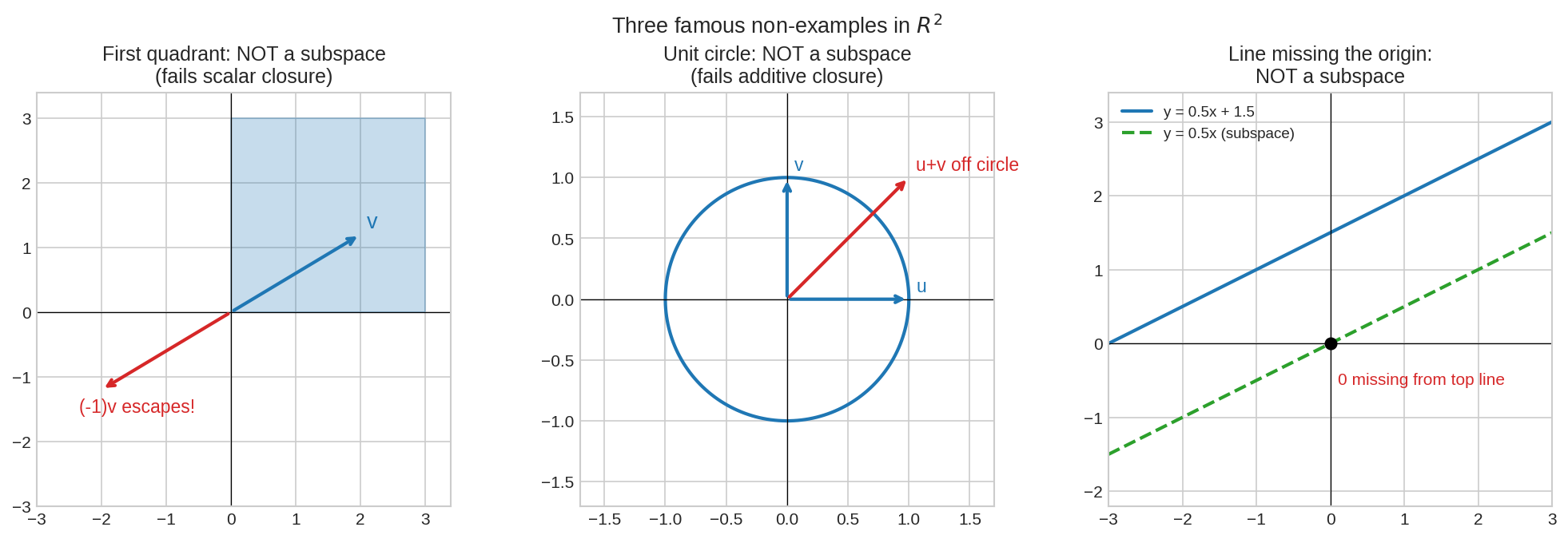
তিন প্রতারক: (ক) first quadrant — \((-1)\) দিয়ে গুণ করলেই পালিয়ে যায়; (খ) unit circle — দুই সদস্যের যোগফল circle ছেড়ে বেরিয়ে যায়; (গ) origin-এর ওপর দিয়ে না-যাওয়া line — \(0\) vector-ই নেই, তাই শুরুতেই বাতিল।
৩. কোথায় ইউজ হয়?¶
কেন এত কষ্ট করে abstract সংজ্ঞা? কারণ একবার প্রমাণ করলে সেটা সব vector space-এ খাটে — অসাধারণ সাশ্রয়!
- Data Science-এ solution set: Machine Learning-এ linear system \(Ax = 0\)-এর সব solution মিলে একটা subspace বানায় (Part II-তে দেখা homogeneous system)। এই জ্ঞানটাই আমাদের বলে দেয় — দুইটা solution জানলে তাদের যেকোনো মিশ্রণও solution।
- Signal processing / Audio: সব audio signal-এর set একটা function space। দুটো গান মেশালে (যোগ) আরেকটা signal-ই পাওয়া যায়; volume বাড়ালে (scalar গুণ) তা-ও। Noise cancellation-এর গণিত এই space-এই চলে।
- Image-এর জগৎ: \(100 \times 100\) pixel-এর সব grayscale ছবি মিলে \(R^{10000}\) — একটা vector space। "মুখের ছবিগুলো" এর ভেতরে মোটামুটি একটা ছোট subspace-এর কাছাকাছি থাকে — এই idea-তেই Eigenfaces (Part VI) কাজ করে।
- Polynomial regression: ডিগ্রি \(\le 2\)-এর সব polynomial-এর set \(P_2\) একটা vector space। Curve fitting মানে এই space-এর মধ্যে সেরা সদস্যটা খোঁজা (Part V-এ least squares)।
- Deep Learning-এর feature space: Neural network-এর প্রতিটি layer-এর output একটা vector space-এ বাস করে; representation learning মানে "ভালো subspace খুঁজে বের করা"।
৪. Properties¶
Property 1: Zero vector একটাই¶
যদি \(0_V\) আর \(0'_V\) দুটোই zero হয়, তাহলে
প্রথম সমতা \(0'_V\)-এর zero-ধর্ম থেকে, দ্বিতীয়টা \(0_V\)-এর। কাজেই দুই zero আসলে একই।
Property 2: \(0 \cdot v = 0_V\) — সংখ্যা শূন্য দিয়ে গুণ করলে zero vector¶
দুই পাশ থেকে \(0 \cdot v\)-এর additive inverse যোগ করলে: \(0_V = 0 \cdot v\)। লক্ষ করো — এটা axiom নয়, axiom থেকে প্রমাণ হলো। এই জন্যই axiom-গুলো এত যত্নে বাছাই করা।
Property 3: \((-1) \cdot v = -v\)¶
অর্থাৎ \((-1)v\)-ই হলো \(v\)-এর additive inverse। "মাইনাস ওয়ান দিয়ে গুণ = উল্টো দিক" — Part I-এর arrow-ছবির সাথে হুবহু মিলে গেল।
Property 4: প্রতিটি subspace-এ \(0_V\) থাকতেই হবে¶
\(U\) non-empty, তাই কোনো \(u \in U\) আছে। Scaling closure অনুযায়ী \(0 \cdot u = 0_V \in U\)। এই জন্যই origin-না-ছোঁয়া কোনো কিছু subspace হতে পারে না — আগের ছবির (গ) অংশ।
Property 5: দুই subspace-এর intersection আবার subspace¶
\(U, W\) দুটো subspace হলে \(U \cap W\)-ও subspace: \(u, v\) দুজনেই \(U\)-তে আর \(W\)-তেও থাকলে \(\mu u + \nu v\) দুই ঘরেই থাকবে (দুটোই closed বলে)। কিন্তু union সাধারণত subspace নয় — Problems-এ এর প্রমাণ করবে।
সব রকমের সদস্য: এক নিয়মে অনেক জগৎ¶
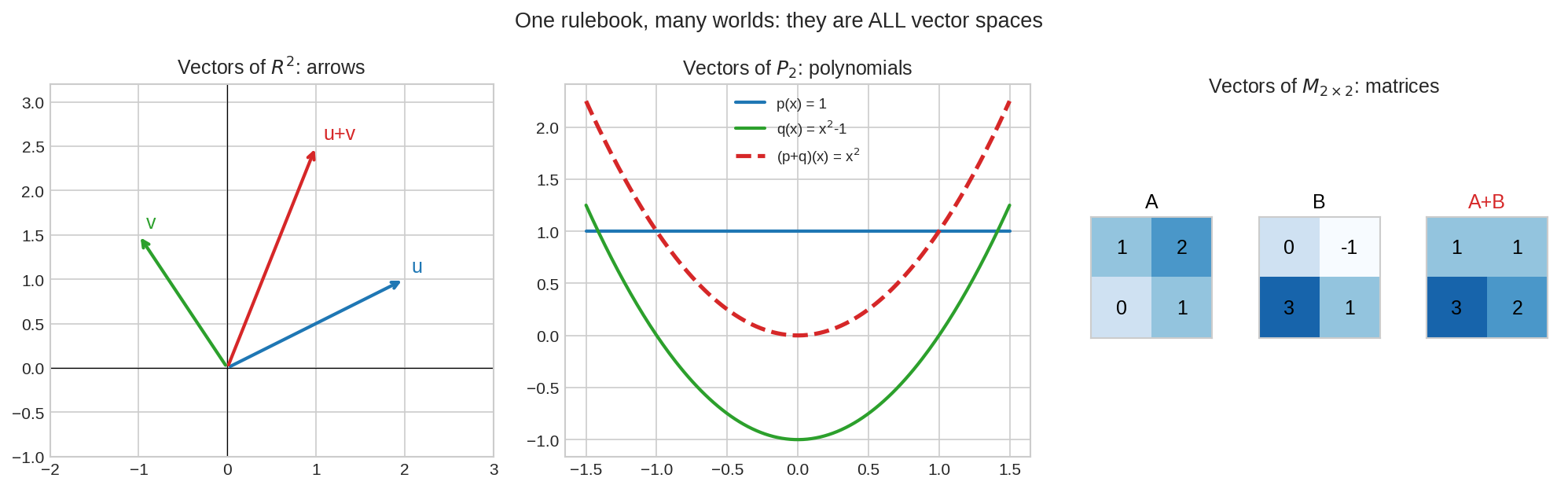
Arrow, polynomial, matrix — চেহারা আলাদা, কিন্তু তিনটাই একই ১০-নিয়মের ক্লাবের সদস্য। "\(u + v\)" লেখার সময় তিন জগতে তিন রকম কাজ হয়, তবু algebra-র নিয়ম একদম এক।
কিছু গুরুত্বপূর্ণ উদাহরণ (Guest বইয়ের chapter 5-এর মূল বার্তা):
| Space | সদস্যরা | Zero vector |
|---|---|---|
| \(R^n\) | \(n\)টি সংখ্যার column | সব-শূন্য column |
| \(P_n\) | ডিগ্রি \(\le n\) polynomial | zero polynomial \(p(t) = 0\) |
| \(R^R = \{f : R \to R\}\) | function | zero function \(f(x)=0\) |
| \(M_{2\times 2}\) | \(2 \times 2\) matrix | zero matrix |
| \(\{f : f'' + f = 0\}\) | differential equation-এর solution | zero function |
৫. Intuition — কেন সত্য?¶
কেন ঠিক এই ১০টা নিয়ম? 3Blue1Brown-এর ভঙ্গিতে ভাবো: আমরা চাই "arrow-দের নিয়ে যা যা করা যায়" তার একটা সর্বনিম্ন চুক্তিপত্র। Arrow যোগ হয় tip-to-tail-এ — সেখানে ক্রম বদলালে একই parallelogram পাওয়া যায় (commutativity-র ছবি)। Arrow-কে টেনে লম্বা করা যায় (scaling)। একটা "কোথাও-না-যাওয়া" arrow আছে (zero)। প্রতিটা arrow-র উল্টোটা আছে।
এবার মজাটা দেখো: polynomial-রাও ঠিক এই চুক্তি মানে। \(p(t) + q(t)\) আবার polynomial, \(c \cdot p(t)\)-ও তাই। তাহলে polynomial নিয়ে আঁকা যায় না এমন কোনো "ছবি" কি সত্যিই নেই? আছে — আর সেটাই vector space-এর জাদু: চুক্তিটা যেহেতু এক, geometry-র সব উপপাদ্য (theorem) — projection, basis, dimension — polynomial-দের জগতেও হুবহু খাটবে। একবার প্রমাণ, সর্বত্র প্রযোজ্য।
Subspace-এর intuition-টাও geometric: origin দিয়ে যাওয়া plane-এ দাঁড়িয়ে তুমি যদি শুধু plane-এর ভেতরের arrow-ই ব্যবহার করো, তোমার কাছে জগৎটা \(R^2\)-এর মতোই লাগবে — তুমি টেরই পাবে না যে বাইরে একটা তৃতীয় মাত্রা আছে। Subspace মানে স্বয়ংসম্পূর্ণ ছোট মহাবিশ্ব।
আর কেন origin লাগবেই? কারণ "কোনো নড়াচড়া না করা" (\(0\) vector) ছাড়া নড়াচড়ার কোনো অ্যালজেব্রা দাঁড়ায় না — \(u + (-u)\)-এর ফলাফলের একটা বাসা তো লাগবে!
৬. Code-এ কেমনে লিখে¶
Subspace test-টা আমরা সরাসরি NumPy দিয়ে বানাতে পারি — random সদস্য নিয়ে closure পরীক্ষা:
import numpy as np
np.random.seed(42)
def in_xy_plane(v, tol=1e-9):
"""z=0 plane-এর সদস্য কি না"""
return abs(v[2]) < tol
def in_shifted_plane(v, tol=1e-9):
"""z=1 plane (origin দিয়ে যায় না)"""
return abs(v[2] - 1.0) < tol
def subspace_test(membership, sampler, n_trials=1000):
"""তিন ধাপ: zero, addition closure, scaling closure"""
if not membership(np.zeros(3)):
return "FAIL: zero vector নেই"
for _ in range(n_trials):
u, v = sampler(), sampler()
c = np.random.randn()
if not membership(u + v):
return "FAIL: addition closure ভাঙে"
if not membership(c * u):
return "FAIL: scaling closure ভাঙে"
return "PASS: subspace হওয়ার সব লক্ষণ আছে"
# xy-plane-এর random সদস্য: (x, y, 0)
sample_xy = lambda: np.array([np.random.randn(), np.random.randn(), 0.0])
# z=1 plane-এর random সদস্য: (x, y, 1)
sample_shift = lambda: np.array([np.random.randn(), np.random.randn(), 1.0])
print("xy-plane :", subspace_test(in_xy_plane, sample_xy))
print("shifted plane :", subspace_test(in_shifted_plane, sample_shift))
Output:
xy-plane : PASS: subspace হওয়ার সব লক্ষণ আছে
shifted plane : FAIL: zero vector নেই
ব্যাখ্যা: কোড আমাদের ৩-ধাপ test-এরই যান্ত্রিক রূপ। xy-plane হাজারবার random চেষ্টাতেও ঘর ছাড়ে না; সরানো plane প্রথম ধাপেই (\(0 \notin U\)) ধরা পড়ে। মনে রেখো — কোড কখনো প্রমাণ নয় (সে শুধু সসীম সংখ্যক চেষ্টা করে), কিন্তু counterexample খুঁজতে সে ওস্তাদ।
৭. Worked Examples¶
Example 1: \(U = \{(x, y, z) \in R^3 : x + 2y - z = 0\}\) কি subspace?¶
ধাপ ১ (zero): \(0 + 2\cdot 0 - 0 = 0\) ✓ — তাই \(0 \in U\)।
ধাপ ২ (addition): ধরো \(u = (x_1, y_1, z_1)\), \(v = (x_2, y_2, z_2)\) দুজনেই শর্ত মানে। তাহলে
কাজেই \(u + v \in U\) ✓
ধাপ ৩ (scaling): \(cx_1 + 2(cy_1) - cz_1 = c(x_1 + 2y_1 - z_1) = c \cdot 0 = 0\) ✓
উপসংহার: \(U\) একটি subspace — এটা origin দিয়ে যাওয়া একটা plane। লক্ষ করো, পুরো যুক্তিটা চলেছে সমীকরণের ডান পাশে \(0\) আছে বলে। ডান পাশে \(5\) থাকলে ধাপ ১-এই ভেঙে পড়ত।
Example 2: \(W = \{p \in P_2 : p(1) = 0\}\) — যেসব polynomial-এর \(t=1\)-এ মান শূন্য¶
এটা arrow-জগৎ ছেড়ে function-জগতে আমাদের প্রথম test!
ধাপ ১: zero polynomial-এর সব জায়গায় মান \(0\), বিশেষত \(p(1) = 0\) ✓
ধাপ ২: \(p(1) = 0\) এবং \(q(1) = 0\) হলে \((p+q)(1) = p(1) + q(1) = 0 + 0 = 0\) ✓
ধাপ ৩: \((cp)(1) = c \cdot p(1) = c \cdot 0 = 0\) ✓
উপসংহার: subspace! যেমন \(t - 1\) ও \(t^2 - 1\) দুজনেই সদস্য; তাদের যোগফল \(t^2 + t - 2\)-এরও \(t=1\)-এ মান \(1 + 1 - 2 = 0\)।
Example 3: \(S = \{(x, y) \in R^2 : xy \ge 0\}\) (প্রথম ও তৃতীয় quadrant)¶
ধাপ ১: \(0 \cdot 0 = 0 \ge 0\) ✓ — zero আছে।
ধাপ ৩: \(c(x, y) = (cx, cy)\) দিলে \((cx)(cy) = c^2 xy \ge 0\) ✓ — scaling-ও টিকে যায়!
ধাপ ২: এখানেই ফাঁদ। \(u = (1, 0) \in S\) (কারণ \(1 \cdot 0 = 0 \ge 0\)) এবং \(v = (0, -1) \in S\); কিন্তু
উপসংহার: subspace নয় — শুধু একটা counterexample-ই যথেষ্ট। শিক্ষা: তিনটা test-ই চেক করতে হবে; দুটো পাশ করা মানেই পাশ নয়।
৮. Problems ও Solutions¶
Problem 1. নিচের কোনগুলো \(R^3\)-এর subspace? প্রতিটির জন্য প্রমাণ বা counterexample দাও। (ক) \(\{(x, y, z) : 3x - y + 2z = 0\}\) (খ) \(\{(x, y, z) : 3x - y + 2z = 4\}\) (গ) \(\{(x, y, z) : z \ge 0\}\)
Solution
(ক) Subspace। Zero: \(3(0) - 0 + 2(0) = 0\) ✓। যদি \(u, v\) দুজনেই শর্ত মানে, তবে \(\mu u + \nu v\)-এর জন্য:
Subspace Theorem অনুযায়ী প্রমাণ শেষ। জ্যামিতিকভাবে: origin দিয়ে যাওয়া plane।
(খ) Subspace নয়। \(3(0) - 0 + 2(0) = 0 \ne 4\), অর্থাৎ zero vector-ই set-এ নেই — Property 4 লঙ্ঘিত। এটা একটা সরানো (shifted) plane।
(গ) Subspace নয়। \((0, 0, 1)\) সদস্য, কিন্তু \((-1)(0, 0, 1) = (0, 0, -1)\)-এর \(z = -1 < 0\) — scaling closure ভাঙে। (উপরের অর্ধেক জগৎ, first-quadrant-এর মতোই একমুখো।)
Problem 2. প্রমাণ করো: যেকোনো vector space \(V\)-তে additive inverse অনন্য (unique) — অর্থাৎ প্রতিটি \(u\)-এর জন্য \(u + w = 0_V\) মানার \(w\) একটাই।
Solution
ধরো \(w_1\) ও \(w_2\) দুজনেই \(u\)-এর inverse: \(u + w_1 = 0_V\) এবং \(u + w_2 = 0_V\)। তাহলে
প্রতিটি ধাপে ব্যবহার হয়েছে: zero-র সংজ্ঞা, \(w_2\)-এর inverse-ধর্ম, associativity, \(w_1\)-এর inverse-ধর্ম (commutativity সহ), আবার zero-র সংজ্ঞা। দশটা axiom-এর অন্তত চারটা এক প্রমাণেই কাজে লেগে গেল!
Problem 3. \(V = R^2\) নাও, কিন্তু scalar multiplication-টা বদলে দাও: \(c \odot (x, y) := (cx, y)\) (শুধু প্রথম component scale হয়)। Addition স্বাভাবিক। এটা কি vector space? কোন axiom ভাঙে?
Solution
ভাঙে distributivity (scalar) axiom: \((c + d) \odot v = c \odot v + d \odot v\) হওয়া উচিত। বাম পাশ:
ডান পাশ:
\((2, 1) \ne (2, 2)\) — কাজেই এটা vector space নয়। (Guest বইয়ের "নতুন operation প্রস্তাব করো" ধাঁচের সমস্যা থেকে adapted। শিক্ষা: শুধু set নয়, operation-এর জোড়াসহ পুরো প্যাকেজটা মিলে vector space হয়।)
Problem 4. \(U\) ও \(W\) যদি \(V\)-এর subspace হয়, প্রমাণ করো \(U \cap W\) subspace। তারপর \(R^2\)-এ এমন \(U, W\) দাও যেন \(U \cup W\) subspace না হয়।
Solution
Intersection: \(0 \in U\) এবং \(0 \in W\) (দুটোই subspace), তাই \(0 \in U \cap W\) — non-empty। এখন \(u, v \in U \cap W\) আর scalar \(\mu, \nu\) নিলে: \(u, v \in U \Rightarrow \mu u + \nu v \in U\) (\(U\) closed); একই যুক্তিতে \(\mu u + \nu v \in W\)। কাজেই \(\mu u + \nu v \in U \cap W\) — Subspace Theorem মতে প্রমাণিত।
Union-এর counterexample: \(U = x\)-axis \(= \{(x, 0)\}\), \(W = y\)-axis \(= \{(0, y)\}\)। দুটোই subspace। কিন্তু \((1, 0) \in U \cup W\) এবং \((0, 1) \in U \cup W\) হলেও
— কারণ \((1,1)\) কোনো axis-এই নেই। দুই রাস্তার মিলিত set রাস্তাই থেকে যায়, plane হয়ে যায় না!
Problem 5. \(C^\infty = \{f : R \to R,\ f\) infinitely differentiable\(\}\) vector space (মেনে নাও)। দেখাও যে \(U = \{f \in C^\infty : f'' + f = 0\}\) একটি subspace, এবং এর দুটি অশূন্য সদস্যের নাম বলো।
Solution
Zero: zero function-এর জন্য \(0'' + 0 = 0\) ✓। Closure (এক ধাপে): \(f'' + f = 0\) এবং \(g'' + g = 0\) হলে, derivative-এর linearity ব্যবহার করে:
কাজেই subspace। দুই সদস্য: \(f(x) = \sin x\) (কারণ \(-\sin x + \sin x = 0\)) এবং \(g(x) = \cos x\)। আসলে এই subspace-এর সব সদস্য \(a\sin x + b\cos x\) আকারের — differential equation-এর solution set-ও যে একটা ছোট জগৎ, এই দৃষ্টিভঙ্গিটাই পুরো Part IV-এর উপহার।
Problem 6. \(M_{2\times2}\)-এর মধ্যে symmetric matrix-দের set \(S = \{A : A^T = A\}\) কি subspace? Skew-symmetric (\(A^T = -A\)) set-টাও চেক করো।
Solution
Symmetric: zero matrix symmetric ✓। \(A^T = A\), \(B^T = B\) হলে transpose-এর linearity (Part III) থেকে:
কাজেই subspace ✓।
Skew-symmetric: \((\mu A + \nu B)^T = \mu A^T + \nu B^T = -\mu A - \nu B = -(\mu A + \nu B)\) ✓ — এটাও subspace। Zero matrix দুই দলেই আছে (\(0^T = 0 = -0\))। বোনাস observation: যেকোনো matrix \(M = \frac{M + M^T}{2} + \frac{M - M^T}{2}\) — একটি symmetric আর একটি skew-symmetric অংশের যোগফল; দুই subspace মিলে পুরো space "gড়ে তোলে" — এই idea-ই পরের chapter-গুলোর span।
Problem 7. সত্য/মিথ্যা যাচাই করো: "যদি \(U\)-তে \(0\) থাকে এবং \(U\) addition-এ closed হয়, তাহলেই \(U\) subspace।"
Solution
মিথ্যা। Scaling test বাদ দেওয়া যায় না। Counterexample: \(U = Z^2 = \{(m, n) : m, n\) পূর্ণসংখ্যা\(\} \subset R^2\) (grid-এর বিন্দুগুলো)। \(0 = (0,0) \in U\) ✓; দুই grid-point-এর যোগফল আবার grid-point ✓। কিন্তু
আরেকটা সূক্ষ্ম কথা: first quadrant উদাহরণে (Worked Example 3-এর মতো set-এ) দেখেছ scaling ভাঙতে পারে এমনকি addition টিকলেও — তিনটে test-এর প্রত্যেকটা স্বাধীনভাবে জরুরি।
৯. Common ভুল¶
| ❌ ভুল ধারণা | ✅ ঠিক ধারণা |
|---|---|
| "যেকোনো plane-ই \(R^3\)-এর subspace" | শুধু origin দিয়ে যাওয়া plane-ই subspace; \(z = 1\) plane-এ \(0\) vector-ই নেই |
| "Vector মানেই arrow বা সংখ্যার list" | Polynomial, function, matrix — ১০ নিয়ম মানলেই সে vector; চেহারা যা-ই হোক |
| "Subspace চেক করতে ১০টা axiom-ই দেখতে হবে" | Subset-এর জন্য মাত্র ৩টা: \(0\) আছে কি, addition ও scaling-এ closed কি — বাকিটা \(V\) থেকে inherited |
| "\(U \cup W\) দুই subspace-এর union, তাই subspace" | সাধারণত নয় — দুই axis-এর union-এ \((1,0)+(0,1)=(1,1)\) থাকে না; intersection কিন্তু সবসময় subspace |
| "কয়েকটা উদাহরণে closure টিকলেই প্রমাণ হয়ে গেল" | উদাহরণ যাচাই কখনো প্রমাণ নয়; প্রমাণে লাগবে যেকোনো সদস্যের জন্য যুক্তি, আর বাতিল করতে লাগবে মাত্র একটা counterexample |
১০. এক নজরে¶
| ধারণা | এক লাইনে |
|---|---|
| Vector Space | Addition ও scalar multiplication-এ closed একটি set, সাথে ১০টি ভদ্রতা-নিয়ম |
| Subspace | বড় space-এর ভেতরের subset যে নিজেও vector space |
| Subspace Theorem | Non-empty \(U\) subspace \(\iff\) \(\mu u_1 + \nu u_2 \in U\) সর্বদা |
| দ্রুততম বাতিল-test | \(0 \notin U\) হলেই শেষ — origin ছাড়া subspace হয় না |
| \(R^3\)-এর সব subspace | \(\{0\}\), origin-এর line, origin-এর plane, পুরো \(R^3\) |
| বড় লাভ | এক প্রমাণ, সব জগতে প্রযোজ্য — polynomial, function, matrix |
পরের chapter-এর সেতু: subspace-রা তৈরি হয় কীভাবে? কয়েকটা vector-এর সব linear combination নিয়ে — অর্থাৎ span দিয়ে। কিন্তু span বানাতে গিয়ে যদি কোনো vector "ফালতু" হয় — অন্যদের দিয়েই যাকে বানানো যায়? সেই অপ্রয়োজনীয় vector চেনার কৌশলই Linear Independence — Chapter 4.2-তে।
📓 Notebook Project¶
notebooks/part-04/ch01-project.ipynb — নিজের হাতে একটি "Subspace Detector" বানাবে: random sampling দিয়ে closure test, পাঁচ রকম set-এ চালিয়ে PASS/FAIL রায়, আর 3D visualization।