Chapter 2.4 — Solution Set-এর Geometry (সমাধান সেটের জ্যামিতি)¶
🎯 এই chapter-এ যা শিখবে¶
- Hyperplane(হাইপারপ্লেন) — একটা linear equation \(\mathbb{R}^n\)-এ ঠিক কী আঁকে, আর কেন "এক equation = এক মাত্রা কম"
- একটা linear system-এর solution set-এর সম্ভাব্য সব আকৃতি: বিন্দু, লাইন, প্লেন, … , নাকি একেবারে খালি
- Free variable-সংখ্যা = solution set-এর মাত্রা — RREF থেকে geometry পড়ে ফেলা
- এই Part-এর মুকুট-উপপাদ্য: সমাধান = particular solution + homogeneous solutions — এবং তার পূর্ণ প্রমাণ
- কেন homogeneous সমাধানেরা নিজেরাই একটা সুন্দর জগৎ (আসন্ন subspace ধারণার প্রথম দর্শন)
🖼️ এক ছবিতে মূল idea¶
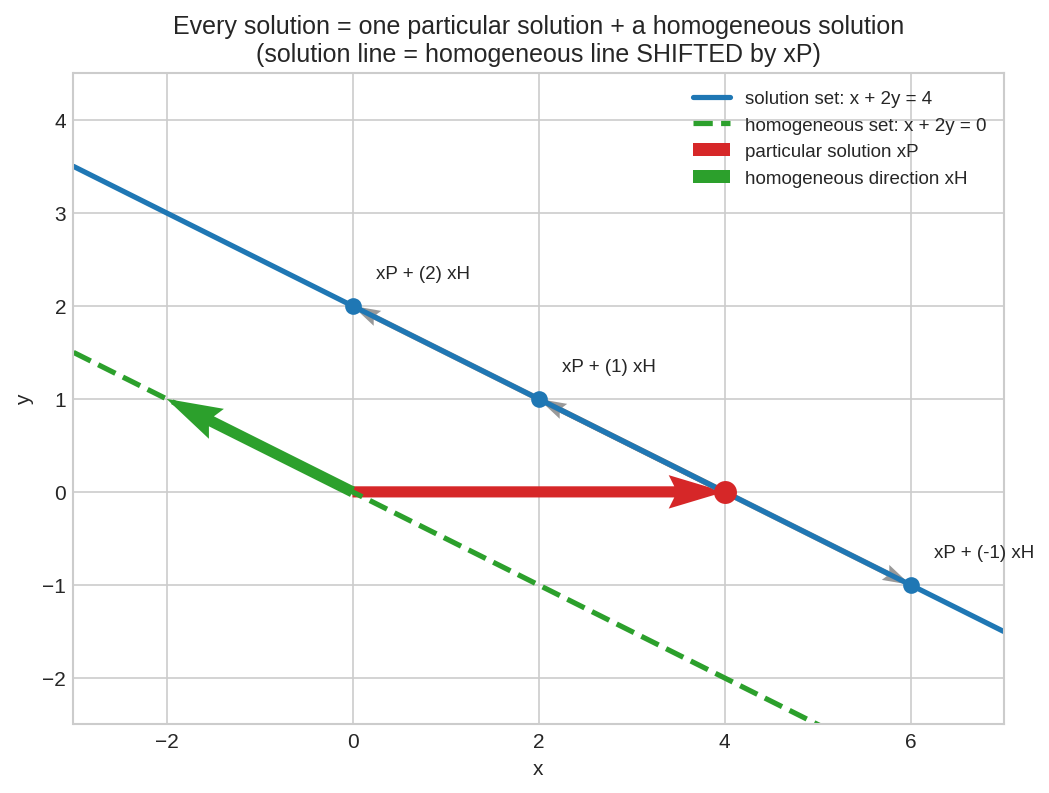
\(x+2y=4\)-এর সমাধান সেট (নীল লাইন) হলো homogeneous সেট \(x+2y=0\)-এর (সবুজ dashed, origin-ভেদী) একটা সরানো কপি — সরিয়েছে particular solution \(\mathbf{x}^P=(4,0)\)। যেকোনো সমাধান \(=\mathbf{x}^P + t\,\mathbf{x}^H\): এক পা particular-এ, তারপর homogeneous দিকে যত খুশি হাঁটো।
১. কি? (What)¶
শর্ত মানেই স্বাধীনতা-হরণ¶
ধরো তুমি \(\mathbb{R}^3\)-এ একটা বিন্দু বাছছো — পুরো স্বাধীনতা: ৩টা সংখ্যা ইচ্ছামতো, ৩ degrees of freedom(স্বাধীনতার মাত্রা)। এখন একটা শর্ত দিলাম: \(x+2y+z=4\)। আর যা-খুশি নয় — \(x, y\) বাছলে \(z\) নির্ধারিত। স্বাধীনতা কমে ২: শর্ত-মানা বিন্দুরা মিলে একটা দ্বিমাত্রিক প্লেন। আরেকটা (স্বাধীন) শর্ত দিলে স্বাধীনতা ১ — একটা লাইন। আরেকটায় ০ — একটা বিন্দু। প্রতিটা কার্যকর linear শর্ত ঠিক একটা মাত্রা খায় — এই সরল হিসাবটাই এই chapter-এর মেরুদণ্ড।
Hyperplane: "এক equation-এর আঁকা ছবি"-র সাধারণ নাম¶
\(\mathbb{R}^n\)-এ একটা linear equation \(a_1x_1 + \cdots + a_nx_n = b\) (সব \(a_i\) একসাথে শূন্য নয়) যে জিনিসটা আঁকে তার নাম Hyperplane: একটা \((n-1)\)-মাত্রিক "সমতল জিনিস"।
- \(\mathbb{R}^2\)-তে: লাইন (মাত্রা \(1\))
- \(\mathbb{R}^3\)-তে: প্লেন (মাত্রা \(2\))
- \(\mathbb{R}^{100}\)-তে: \(99\)-মাত্রিক hyperplane — আঁকতে পারবে না, কিন্তু হিসাব একই!
"Hyper" শব্দে ভয়ের কিছু নেই — এটা শুধু "লাইন/প্লেনের বড় ভাই"-দের এক নামে ডাকা। আর linear system solve করা মানে জ্যামিতিকভাবে: কতগুলো hyperplane-এর সাধারণ ছেদ খোঁজা।
দুই চরিত্র: particular আর homogeneous¶
\(A\mathbf{x}=\mathbf{b}\) সিস্টেমের পাশে সবসময় তার ছায়াসঙ্গী দাঁড়িয়ে — Homogeneous System(সমসত্ত্ব সিস্টেম) \(A\mathbf{x}=\mathbf{0}\) (ডানপাশ শূন্য করে দেওয়া)।
- \(A\mathbf{x}^P=\mathbf{b}\) মানে এমন যেকোনো একটা সমাধান \(\mathbf{x}^P\) — নাম Particular Solution(নির্দিষ্ট সমাধান);
- \(A\mathbf{x}^H=\mathbf{0}\) মানে ছায়াসঙ্গীর সমাধান — নাম Homogeneous Solution(সমসত্ত্ব সমাধান)।
এ chapter-এর কেন্দ্রীয় দাবি (প্রমাণ §৪-এ): \(A\mathbf{x}=\mathbf{b}\)-এর প্রতিটা সমাধান লেখা যায়
আকারে — একটা নির্দিষ্ট জায়গা (\(\mathbf{x}^P\)) + সেখান থেকে "ফ্রি ঘোরাঘুরি"র দিকগুলো (\(\mathbf{x}^H\))।
২. দেখতে কেমন?¶
এক equation, এক মাত্রা কম¶
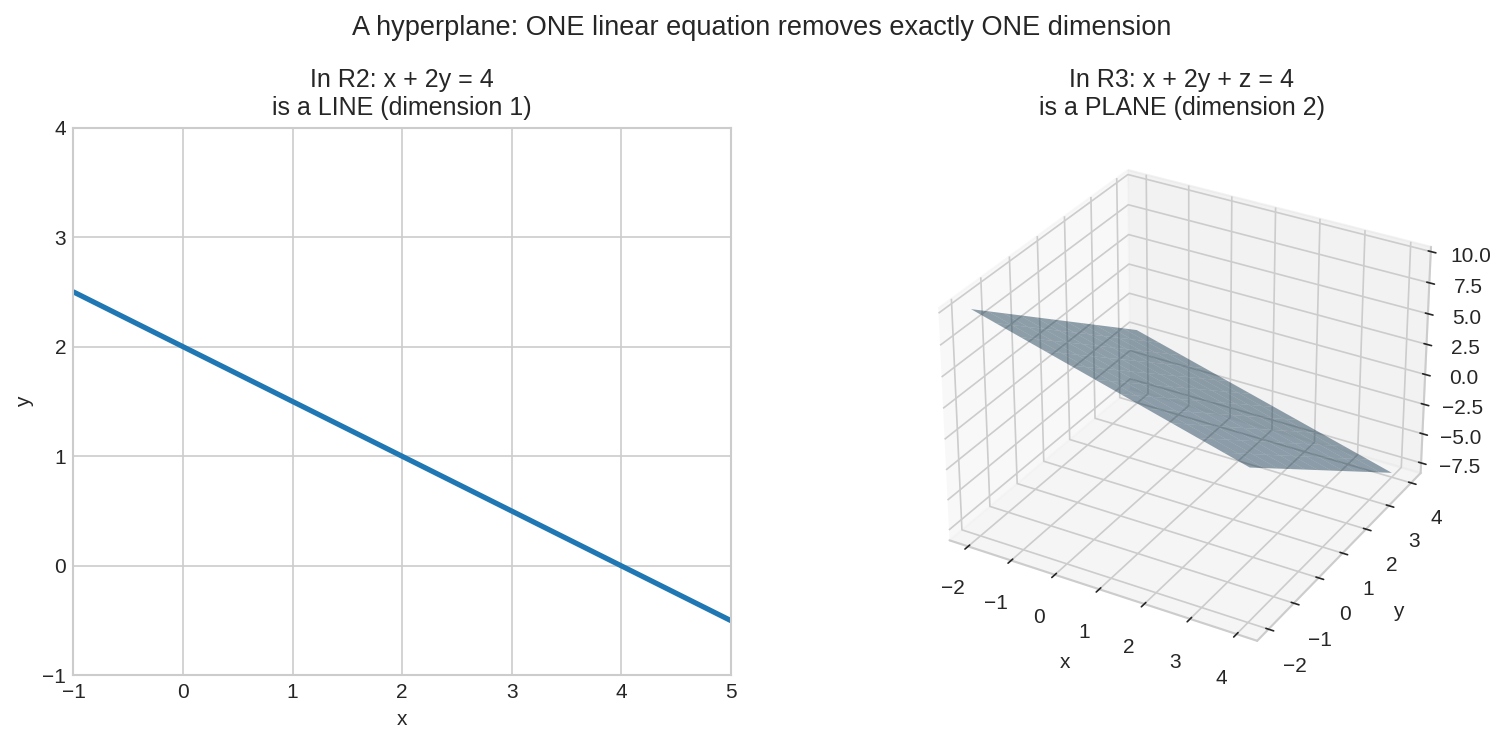
একই ধাঁচের equation: \(\mathbb{R}^2\)-তে \(x+2y=4\) একটা লাইন, \(\mathbb{R}^3\)-তে \(x+2y+z=4\) একটা প্লেন — সবসময় চারপাশের স্পেসের চেয়ে ঠিক এক মাত্রা কম। এটাই hyperplane।
\(\mathbb{R}^3\)-এ সমাধান সেটের চেহারা-পরিবার¶
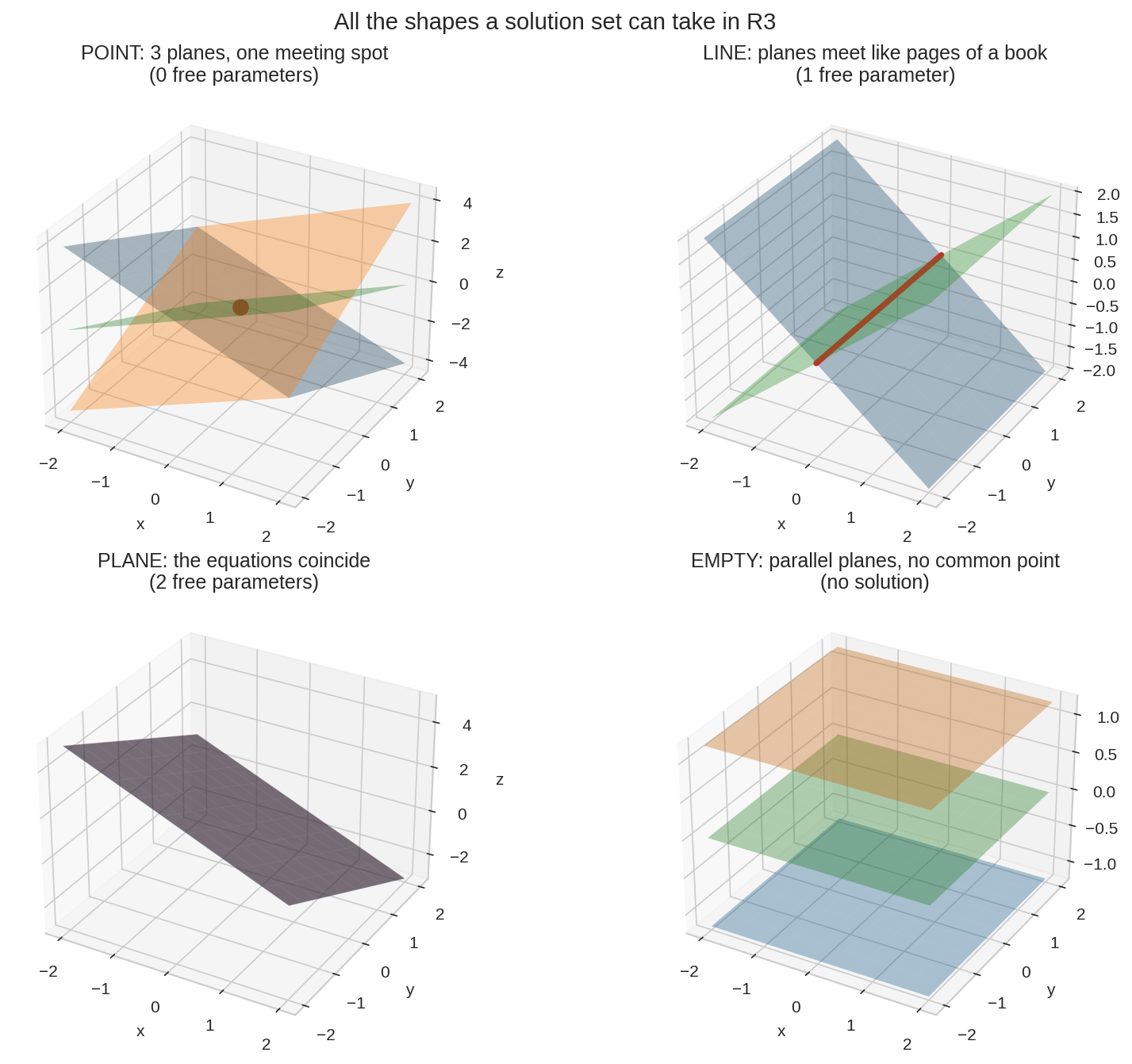
তিন unknown-এর সিস্টেমে সম্ভাব্য দৃশ্য: প্লেনরা এক বিন্দুতে মেলে (০ free variable); বইয়ের পাতার মতো এক লাইনে মেলে (১টা); সব equation একই প্লেন (২টা); নয়তো সমান্তরাল হয়ে কোথাও না — সমাধান নেই। (\(3\) free variable-ও সম্ভব — যদি সব equation \(0=0\) হয়, সমাধান পুরো \(\mathbb{R}^3\)!)
গুনে দেখো: \(\mathbb{R}^3\)-এ মোট \(3+2 = 5\) রকম ভাগ্য — বিন্দু, লাইন, প্লেন, পুরো স্পেস, খালি। সাধারণভাবে \(k\) unknown-এ \(k+2\) রকম: free variable \(0,1,\dots,k\)টা, plus "সমাধান নেই।"
৩. কোথায় ইউজ হয়?¶
- Machine Learning-এর অতিনির্ধারিত জগৎ: আধুনিক deep network-এ parameter (unknown) ডেটার (equation) চেয়ে অনেক বেশি — training loss শূন্য করা সমাধানেরা একটা-দুটো বিন্দু নয়, বিশাল উঁচু-মাত্রার solution manifold; optimizer তার উপর কোথায় নামে সেটাই generalization-এর গবেষণা।
- Recommendation/compressed sensing: measurement কম, unknown বেশি — অসীম সমাধানের ভেতর থেকে "সবচেয়ে সরল"টা (least norm, sparse) বাছা হয়; আগে জানতে হয় সেটটার গঠন \(\mathbf{x}^P + \text{homogeneous}\)।
- Robotics: একটা robot হাতের ৭টা joint, লক্ষ্য-অবস্থান দেয় ৬টা শর্ত — বাকি ১ degree of freedom মানে হাত একই বিন্দু ধরে রেখেও কনুই ঘোরাতে পারে; সেই "কনুই-ঘোরানো"র দিকগুলোই homogeneous solutions!
- Circuit/Chemistry: কোনো circuit-এর current-balance বা রাসায়নিক বিক্রিয়ার ভারসাম্য মেলানো প্রায়ই free parameter রেখে দেয় — মানে অসীম বৈধ সমন্বয়, একটা লাইন/প্লেন জুড়ে।
- Computer Graphics: ray–plane, plane–plane ছেদ প্রতি ফ্রেমে লাখবার — plane-দুটোর ছেদ-লাইন বের করা মানেই এই chapter-এর Example 2।
৪. Properties¶
Property 1 — Free variable-সংখ্যা = solution set-এর মাত্রা¶
RREF-এ প্রতিটা free variable একটা স্বাধীন parameter (\(t, s, \dots\)) — প্রতিটা parameter সমাধান সেটে একটা স্বাধীন "চলার দিক" দেয়। তাই:
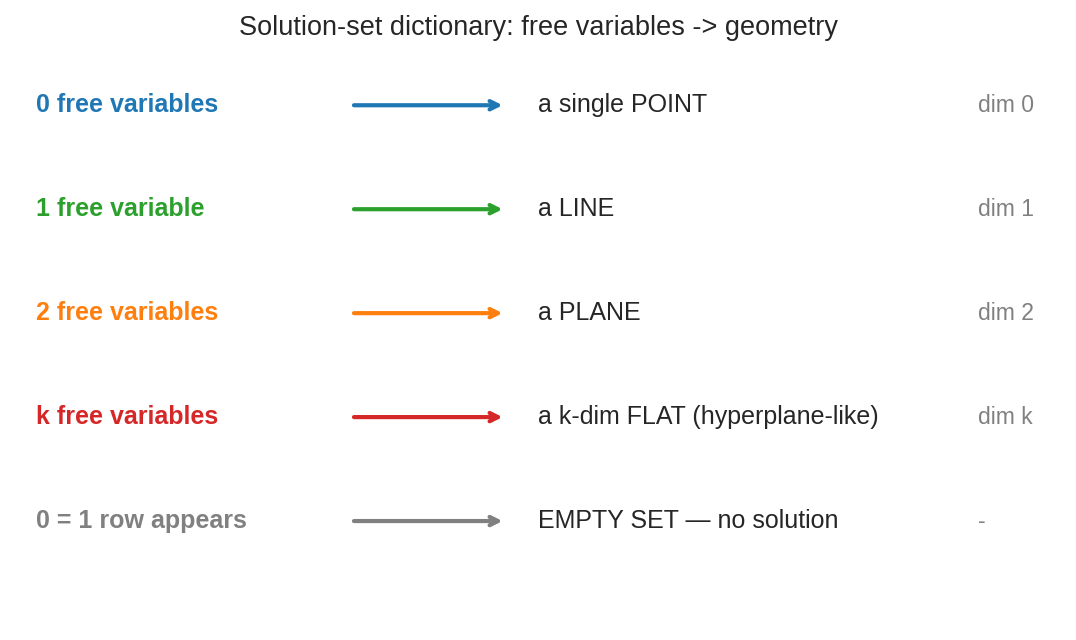
অনুবাদ-অভিধান: consistent সিস্টেমে free variable ০টা → বিন্দু, ১টা → লাইন, ২টা → প্লেন, \(k\)টা → \(k\)-মাত্রিক flat; আর \(0=1\) row মানে সব হিসাব বাতিল — খালি সেট।
Property 2 — মুকুট-উপপাদ্য: Solution = Particular + Homogeneous¶
উপপাদ্য। \(\mathbf{x}^P\) যদি \(A\mathbf{x}=\mathbf{b}\)-এর একটা সমাধান হয়, তবে:
প্রমাণ (দুই দিক):
(⊇) particular + homogeneous রূপের সবাই সমাধান: linearity দিয়ে সরাসরি —
(⊆) প্রতিটা সমাধান ওই রূপের: \(\mathbf{x}\) যেকোনো সমাধান হোক। তাহলে
অর্থাৎ \(\mathbf{x} - \mathbf{x}^P\) একটা homogeneous সমাধান — নাম দাও \(\mathbf{x}^H\); তাহলে \(\mathbf{x} = \mathbf{x}^P + \mathbf{x}^H\)। \(\blacksquare\)
দুই লাইনের প্রমাণ, কিন্তু ফলটা বিশাল: অসীম সমাধানের গোটা সেটটা বর্ণনা করতে লাগে শুধু (i) একটা মাত্র বিন্দু আর (ii) homogeneous সিস্টেমের সমাধানেরা। আর লক্ষ করো — প্রমাণে শুধু \(A\)-র linearity লেগেছে; পরে (Part IV) দেখবে একই বাক্য differential equation-সহ সব linear জগতে খাটে।
Property 3 — Homogeneous সমাধানেরা মিশ্রণে বন্ধ¶
\(A\mathbf{u} = A\mathbf{v} = \mathbf{0}\) হলে যেকোনো \(c, d \in \mathbb{R}\)-এর জন্য:
— অর্থাৎ homogeneous সমাধানদের যেকোনো linear combination আবার homogeneous সমাধান। এরা origin-ভেদী লাইন/প্লেন-জাতীয় একটা আত্মসম্পূর্ণ জগৎ — Part IV-এ এর নামই হবে Null Space(নাল স্পেস), subspace-দের প্রথম বড় উদাহরণ। Non-homogeneous সমাধান সেট কিন্তু এমন নয় (Chapter 2.1-এর Problem 6): সে subspace-এর সরানো কপি মাত্র, নিজে subspace নয় (origin-ই তো নেই তার মধ্যে, যদি \(\mathbf{b}\ne\mathbf{0}\))।
Property 4 — \(\mathbf{x}^P\) বাছাইয়ে স্বাধীনতা, সেট একটাই¶
Particular solution "the" নয়, "a" — সেটের যেকোনো সদস্যকেই \(\mathbf{x}^P\) ধরা যায়; সেট একই থাকে (শুধু ঠিকানা-লেখার সূচনাবিন্দু বদলায়)। RREF থেকে সবচেয়ে সুবিধাজনক বাছাই: সব free variable \(=0\) বসিয়ে যা পাও।
৫. Intuition — কেন সত্য?¶
"সরানো কপি" — অনুবাদের জ্যামিতি¶
Homogeneous সেটটা ভাবো একটা রেলপথের নকশা, origin স্টেশনের উপর পাতা। \(\mathbf{b}\ne\mathbf{0}\) করা মানে স্টেশনটা \(\mathbf{x}^P\)-তে তুলে নিয়ে যাওয়া — নকশা (দিক, আকৃতি, মাত্রা) হুবহু এক, শুধু জায়গা বদলেছে। এজন্যই fig03-এ নীল লাইন আর সবুজ dashed লাইন নিখুঁত সমান্তরাল: \(A\mathbf{x}=\mathbf{b}\)-এর সেট \(= \mathbf{x}^P + (\text{null space})\), অনুবাদে (translation) জ্যামিতি বদলায় না।
এতে একটা গভীর কথা লুকিয়ে: সমাধান সেটের "আকৃতি" \(\mathbf{b}\)-র উপর নির্ভরই করে না — নির্ভর করে শুধু \(A\)-র উপর। \(\mathbf{b}\) ঠিক করে কেবল (i) সেটটা আদৌ আছে কি না (consistency) আর (ii) থাকলে কোথায় বসবে।
দুই প্লেনের ছেদ কেন লাইনের রূপ \(\mathbf{x}^P + t\mathbf{v}\) নেয়¶
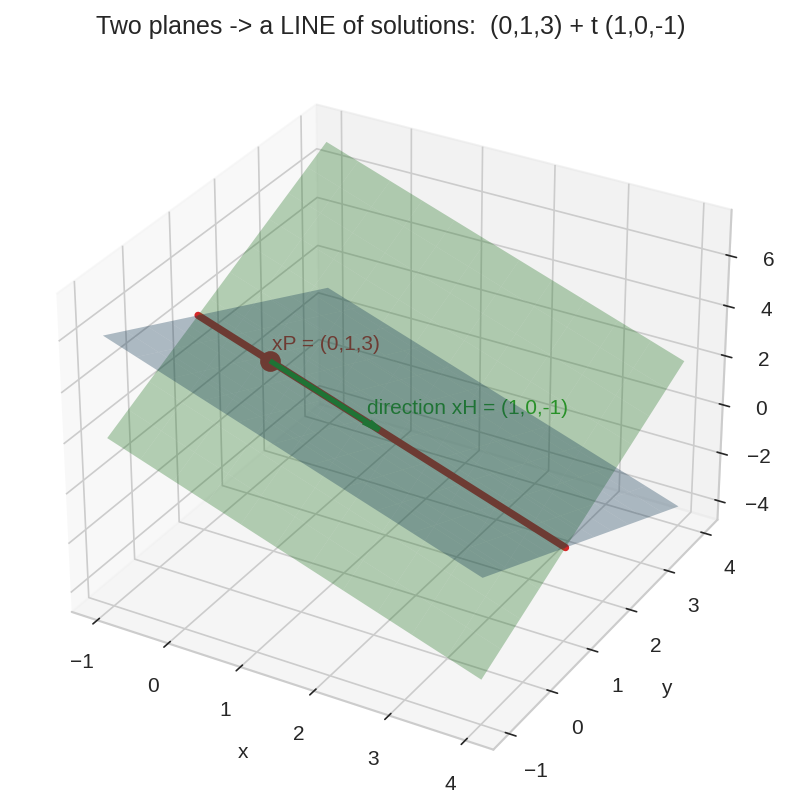
\(x+y+z=4\) আর \(x-y+z=2\) — দুই প্লেনের ছেদ একটা লাইন: \((0,1,3) + t(1,0,-1)\)। লাল বিন্দুটা \(\mathbf{x}^P\) (একটা বাছাই মাত্র!), সবুজ তীরটা homogeneous দিক \(\mathbf{v}\) — দুই প্লেনের উভয়ের সাথেই সমান্তরাল একমাত্র দিক।
ভাবো: লাইনের উপর হাঁটা মানে দুই শর্তই বজায় রেখে নড়া। নড়ার দিক \(\mathbf{v}\) তাহলে দুটো equation-এরই "পরিবর্তন-শূন্য" দিক: \(A\mathbf{v}=\mathbf{0}\) — homogeneous! আর দাঁড়ানোর একটা জায়গা লাগে — \(\mathbf{x}^P\)। Particular = কোথায় দাঁড়াবে, homogeneous = কোন দিকে হাঁটতে পারবে। পুরো উপপাদ্যটা এই এক বাক্যে ধরা যায়।
Degrees of freedom-এর হিসাবটা কখন ভাঙে¶
"প্রতি equation এক মাত্রা খায়" — সাবধান, শর্ত হলো equation-টা নতুন তথ্য আনছে। \(x+y=2\)-এর পরে \(2x+2y=4\) দিলে মাত্রা আর কমে না (RREF-এ সে শূন্য row হয়ে যায়)। কার্যকর equation-সংখ্যা = pivot-সংখ্যা = rank; সঠিক হিসাব: consistent হলে
এটাই Part IV-এর বিখ্যাত Rank–Nullity Theorem-এর প্রথম চেহারা — এখানে সে শুধু "free variable গোনা"।
৬. Code-এ কেমনে লিখে¶
SymPy-র RREF থেকে particular + homogeneous কাঠামো নিজের হাতে বের করি:
import numpy as np
from sympy import Matrix
# system: x1 + x3 - x4 = 1 ; x2 - x3 + x4 = 1 (৪ unknown, ২ equation)
Aug = Matrix([[1, 0, 1, -1, 1],
[0, 1, -1, 1, 1]])
R, piv = Aug.rref()
print(R, "pivot columns:", piv)
# Matrix([[1, 0, 1, -1, 1], [0, 1, -1, 1, 1]]) (0, 1) — এটা এমনিতেই RREF
Pivot column \(\{0,1\}\), তাই free variable: \(x_3, x_4\)। এবার কাঠামো:
n = 4
free = [j for j in range(n) if j not in piv] # [2, 3]
# particular: সব free variable = 0
xP = np.zeros(n)
for i, p in enumerate(piv):
xP[p] = float(R[i, -1])
print("xP =", xP) # [1. 1. 0. 0.]
# প্রতিটা free variable-এর জন্য একটা homogeneous দিক
xHs = []
for f in free:
v = np.zeros(n); v[f] = 1.0
for i, p in enumerate(piv):
v[p] = -float(R[i, f]) # pivot var-রা সমন্বয় করে
xHs.append(v)
print("xH1 =", xHs[0], " xH2 =", xHs[1])
# xH1 = [-1. 1. 1. 0.] xH2 = [ 1. -1. 0. 1.]
যাচাই — কাঠামোটা সত্যিই কাজ করে কি না, এলোমেলো মিশ্রণ বানিয়ে:
A = np.array(Aug[:, :4], dtype=float)
b = np.array(Aug[:, 4], dtype=float).ravel()
rng = np.random.default_rng(42)
for _ in range(3):
m1, m2 = rng.uniform(-5, 5, 2)
x = xP + m1 * xHs[0] + m2 * xHs[1]
print(np.allclose(A @ x, b)) # True True True ✓
যেকোনো \(\mu_1, \mu_2\)-তে \(A\mathbf{x}=\mathbf{b}\) মিলছে — সমাধান সেটটা সত্যিই দ্বিমাত্রিক এক প্লেন: \(\mathbf{x}^P + \mu_1\mathbf{x}^H_1 + \mu_2\mathbf{x}^H_2\)।
৭. Worked Examples¶
Example 1 — RREF থেকে পুরো সমাধান সেট (২ free variable)¶
সিস্টেমের RREF (উপরের কোডেরটাই, হাতে):
Pivot: \(x_1, x_2\); free: \(x_3 = \mu_1,\ x_4 = \mu_2\)। Pivot-দের free-দের ভাষায় লিখি:
সব একসাথে, vector আকারে:
— \(\mathbb{R}^4\)-এর ভেতরে একটা দ্বিমাত্রিক প্লেন। খেয়াল করো \(\mathbf{x}^H\)-দের গঠন: free ঘরে \(1\)/\(0\), আর pivot ঘরে RREF-এর free column-এর entry-রা চিহ্ন-উল্টে।
Example 2 — দুই প্লেনের ছেদ-লাইন (fig04-এর হিসাব)¶
Pivot: \(x, y\); free: \(z=t\)। পড়ি: \(x = 3-t\), \(y = 1\)। অতএব
কিন্তু fig04 বলছে \(\mathbf{x}^P=(0,1,3)\), দিক \((1,0,-1)\)! কোনো গোলমাল নেই — \(t=3\) বসালে \((0,1,3)\) পাই (Property 4: particular বাছাই স্বাধীন), আর \((-1,0,1) = -(1,0,-1)\) — একই লাইনের দুই দিকনির্দেশ। একই সেট, দুই বর্ণনা। সমাধান সেট মেলাতে হলে বিন্দু-তালিকা মেলাও, সূত্রের চেহারা নয়।
Example 3 — শুধু কাঠামো জেনেই ধাঁধা সমাধান¶
জানা আছে: \(A\mathbf{x}=\mathbf{b}\)-এর দুটো সমাধান \(\mathbf{u}=(1,2,0)\) আর \(\mathbf{v}=(3,1,1)\)। \(A\) বা \(\mathbf{b}\) না জেনেই আরও অসীম সমাধান লেখো।
Property 2 উল্টো করে: \(\mathbf{v}-\mathbf{u} = (2,-1,1)\) একটা homogeneous সমাধান। তাহলে প্রতিটা \(t\)-র জন্য
সমাধান — \(t=0\) দিলে \(\mathbf{u}\), \(t=1\) দিলে \(\mathbf{v}\), \(t=\frac12\) দিলে নতুন সমাধান \((2, \frac32, \frac12)\)… (এটা Chapter 2.1-এর trichotomy প্রমাণেরই যুক্তি — এখন তার আসল ঠিকানা পেলে: দুই সমাধানের ফারাক সবসময় homogeneous জগতে থাকে।)
৮. Problems ও Solutions¶
Problem 1. তিন unknown-এর সিস্টেমের পাঁচ রকম solution set-এর (বিন্দু/লাইন/প্লেন/পুরো \(\mathbb{R}^3\)/খালি) প্রত্যেকটার জন্য একটা করে augmented matrix (RREF রূপে) নিজে বানাও।
Solution
অনেক উত্তর সম্ভব; একেকটা নমুনা:
বিন্দু: \(\left(\begin{smallmatrix}1&0&0&|&1\\0&1&0&|&2\\0&0&1&|&3\end{smallmatrix}\right)\) — তিন pivot, free নেই → একমাত্র \((1,2,3)\)।
লাইন: \(\left(\begin{smallmatrix}1&0&2&|&1\\0&1&-1&|&2\\0&0&0&|&0\end{smallmatrix}\right)\) — ২ pivot, ১ free → ১-মাত্রিক।
প্লেন: \(\left(\begin{smallmatrix}1&1&2&|&3\\0&0&0&|&0\\0&0&0&|&0\end{smallmatrix}\right)\) — ১ pivot, ২ free।
পুরো \(\mathbb{R}^3\): \(\left(\begin{smallmatrix}0&0&0&|&0\\0&0&0&|&0\\0&0&0&|&0\end{smallmatrix}\right)\) — শর্তই নেই, সব বিন্দু সমাধান।
খালি: \(\left(\begin{smallmatrix}1&0&0&|&0\\0&1&0&|&0\\0&0&0&|&1\end{smallmatrix}\right)\) — শেষ row \(0=1\)।
Problem 2. Solve করে সমাধান সেট \(\mathbf{x}^P + \text{(homogeneous)}\) আকারে লেখো, আর তার জ্যামিতিক আকৃতি বলো:
Solution
Pivot: \(x, z\); free: \(y = t\)। পড়ি: \(x = -2t\), \(z = 2\)।
আকৃতি: \(\mathbb{R}^3\)-এ একটা লাইন (\(1\) free variable), যে লাইনটা \((0,0,2)\) দিয়ে গেছে \((-2,1,0)\) দিকে। যাচাই (\(t=1\)): \((-2,1,2)\) → \(-2+2+6=6\) ✓, \(-4+4+14=14\) ✓।
Problem 3. \(A\mathbf{x}=\mathbf{b}\)-এর সমাধান সেট \(\;(1,0,2) + t(3,1,-1)\) হলে, (a) \(A\mathbf{x}=\mathbf{0}\)-এর সমাধান সেট কী? (b) \((7,2,0)\) কি মূল সিস্টেমের সমাধান? (c) মূল সিস্টেমের এমন একটা সমাধান দাও যার দ্বিতীয় component \(5\)।
Solution
(a) Homogeneous সেট = সমাধান সেটের "origin-এ নামানো কপি": \(\{t(3,1,-1) : t\in\mathbb{R}\}\) — \((3,1,-1)\) দিকের origin-ভেদী লাইন।
(b) দেখি \((7,2,0) = (1,0,2) + t(3,1,-1)\) কোনো \(t\)-তে মেলে কি না: প্রথম component: \(1+3t=7 \Rightarrow t=2\); দ্বিতীয়: \(0+2 = 2\) ✓; তৃতীয়: \(2-2 = 0\) ✓। হ্যাঁ, \(t=2\)-তে।
(c) দ্বিতীয় component: \(0 + t = 5 \Rightarrow t=5\): \(\;(1,0,2)+5(3,1,-1) = (16, 5, -3)\)।
Problem 4. সত্য/মিথ্যা — কারণসহ: (a) দুটো homogeneous সমাধানের যোগফল homogeneous সমাধান; (b) দুটো non-homogeneous (\(\mathbf{b}\ne\mathbf{0}\)) সমাধানের যোগফলও সমাধান; (c) non-homogeneous দুই সমাধানের গড় একটা সমাধান; (d) \(\mathbf{0}\) সবসময় \(A\mathbf{x}=\mathbf{b}\)-এর সমাধান।
Solution
(a) সত্য। \(A(\mathbf{u}+\mathbf{v}) = \mathbf{0}+\mathbf{0} = \mathbf{0}\) (Property 3)।
(b) মিথ্যা। \(A(\mathbf{u}+\mathbf{v}) = 2\mathbf{b} \ne \mathbf{b}\) যখন \(\mathbf{b}\ne\mathbf{0}\)।
(c) সত্য! \(A\left(\frac{\mathbf{u}+\mathbf{v}}2\right) = \frac{\mathbf{b}+\mathbf{b}}2 = \mathbf{b}\) ✓ — যোগফল ব্যর্থ কিন্তু গড় সফল; আসলে \(c\mathbf{u} + d\mathbf{v}\) সমাধান হয় ঠিক তখন যখন \(c+d=1\) (এমন মিশ্রণের নাম affine combination — সমাধান সেটের "flat" চরিত্রের আরেক প্রকাশ)।
(d) মিথ্যা যদি \(\mathbf{b}\ne\mathbf{0}\) (\(A\mathbf{0} = \mathbf{0} \ne \mathbf{b}\)); সত্য কেবল homogeneous ক্ষেত্রে।
Problem 5. একটা consistent সিস্টেমে unknown ৫টা, RREF-এ pivot ৩টা। (a) সমাধান সেটের মাত্রা কত? (b) সেটটা কি \(\mathbb{R}^5\)-এর subspace হতে পারে? কখন? (c) এমন কি হতে পারে যে অন্য কেউ একই সিস্টেম solve করে ভিন্ন \(\mathbf{x}^P\) আর ভিন্ন homogeneous দিক পেলো — কে ঠিক?
Solution
(a) \(5 - 3 = 2\) — একটা দ্বিমাত্রিক flat (প্লেন-জাতীয়), \(\mathbb{R}^5\)-এর ভেতরে।
(b) Subspace হতে হলে \(\mathbf{0}\) সদস্য হতে হবে, অর্থাৎ \(A\mathbf{0}=\mathbf{b} \Rightarrow \mathbf{b}=\mathbf{0}\) — কেবল homogeneous হলে। তখন সেটটা null space নিজেই।
(c) দুজনেই ঠিক হতে পারে! \(\mathbf{x}^P\) সেটের যেকোনো বিন্দু হতে পারে, আর homogeneous দিকগুলোও ভিন্নভাবে বাছা যায় (যেমন \(\mathbf{v}_1, \mathbf{v}_2\)-এর বদলে \(\mathbf{v}_1+\mathbf{v}_2, \mathbf{v}_1-\mathbf{v}_2\))। যাচাইয়ের উপায়: দুজনের বর্ণনা একই বিন্দু-সেট দেয় কি না (Example 2-এর শিক্ষা)।
Problem 6. \(\mathbb{R}^4\)-এ hyperplane \(x_1+x_2+x_3+x_4 = 8\) ভাবো। (a) এর মাত্রা কত? (b) এটা কি কোনো homogeneous system-এর সমাধান সেট হতে পারে? (c) এর উপর দুটো বিন্দু আর তাদের সংযোগ-রেখা নাও — রেখাটার প্রতিটা বিন্দু কি hyperplane-এ থাকে? প্রমাণ দাও।
Solution
(a) \(\mathbb{R}^4\)-এ এক equation → মাত্রা \(4-1 = 3\)।
(b) না — \(\mathbf{0}\) বসালে \(0 \ne 8\); homogeneous সেটে origin থাকতেই হয়। (তবে এটা homogeneous hyperplane \(x_1+\cdots+x_4=0\)-এর সরানো কপি।)
(c) \(\mathbf{u}, \mathbf{v}\) দুই বিন্দু হলে (দুটোরই component-যোগফল \(8\)), রেখার বিন্দু \(\mathbf{w} = \mathbf{u}+t(\mathbf{v}-\mathbf{u})\)-এর যোগফল:
প্রতিটা \(t\)-তেই ৮ — পুরো রেখা hyperplane-এর ভেতরে। (Linear জিনিসদের flat-চরিত্র: দুই সদস্যের সংযোগ-রেখা কখনো বাইরে বেরোয় না।)
৯. Common ভুল¶
ভুল ১: "সমাধান সেট একটা subspace।" ✗ \(\mathbf{b}\ne\mathbf{0}\) হলে origin-ই সেটে নেই — subspace নয়। ✓ ঠিক বাক্য: homogeneous সমাধান সেট subspace; সাধারণ সমাধান সেট তার সরানো কপি (affine set)।
ভুল ২: ভিন্ন \(\mathbf{x}^P\) দেখে "উত্তর ভুল" ভাবা। ✗ বইয়ের \(\mathbf{x}^P\)-র সাথে তোমারটা মেলেনি মানেই ভুল নয়। ✓ দুটো বর্ণনা একই সেট কি না পরীক্ষা করো: তোমার \(\mathbf{x}^P\) বইয়ের সূত্রে কোনো parameter-মানে পাওয়া যায় কি না, আর দিক-vector-রা একে অন্যের গুণিতক/মিশ্রণ কি না।
ভুল ৩: Hyperplane-এর মাত্রা গুলিয়ে ফেলা। ✗ "\(\mathbb{R}^{10}\)-এ hyperplane মানে ২D প্লেন।" ✓ Hyperplane-এর মাত্রা সবসময় \(n-1\) — \(\mathbb{R}^{10}\)-এ ৯-মাত্রিক। "প্লেন" শব্দটা এখানে উপমা, মাপ নয়।
ভুল ৪: "সমাধান নেই" আর "trivial solution" গুলিয়ে ফেলা। ✗ \(A\mathbf{x}=\mathbf{0}\)-এর উত্তরে "সমাধান নেই" লেখা। ✓ Homogeneous সিস্টেম কখনোই সমাধানহীন নয় — অন্তত \(\mathbf{0}\) আছে। প্রশ্নটা "আর কেউ আছে কি" (free variable আছে কি না)।
ভুল ৫: Equation গুনেই মাত্রা বলা। ✗ "৩ unknown − ২ equation = লাইন হবেই।" ✓ গুনতে হয় pivot (কার্যকর equation), খাতার equation নয় — duplicate equation মাত্রা খায় না; আর inconsistent হলে তো সেট-ই নেই। সূত্র: \(\dim = \#\text{vars} - \#\text{pivots}\), শুধু consistent হলে।
১০. এক নজরে¶
| ধারণা | এক লাইনে |
|---|---|
| Hyperplane | এক linear equation-এর সেট: \(\mathbb{R}^n\)-এ \((n-1)\)-মাত্রিক flat |
| Solution set-এর আকৃতি | খালি, নয়তো \((\#\text{vars} - \#\text{pivots})\)-মাত্রিক flat — মোট \(k+2\) সম্ভাবনা |
| মুকুট-উপপাদ্য | সমাধান \(= \mathbf{x}^P + \mathbf{x}^H\); প্রমাণ দু-লাইনের, শুধু linearity |
| \(\mathbf{x}^P\) | যেকোনো এক সমাধান (সুবিধাজনক: free-রা সব \(0\)); বাছাই স্বাধীন |
| \(\mathbf{x}^H\)-রা | \(A\mathbf{x}=\mathbf{0}\)-এর সমাধান; মিশ্রণে বন্ধ → null space (subspace!) |
| জ্যামিতি | সমাধান সেট = null space-এর \(\mathbf{x}^P\)-তে সরানো কপি; আকৃতি ঠিক করে \(A\), জায়গা ঠিক করে \(\mathbf{b}\) |
পরের chapter-এর সেতু: এতক্ষণ equation ছিল সমান-চিহ্নের (\(=\)); বাস্তব জীবন প্রায়ই বলে "কমপক্ষে এত, বাজেটের মধ্যে অত" — অসমতা (\(\le, \ge\))। তখন সমাধান সেট hyperplane নয়, hyperplane-দের কেটে বানানো একটা অঞ্চল, আর প্রশ্ন হয় "এর মধ্যে সেরা বিন্দু কোনটা?" Chapter 2.5-এ এই নতুন খেলার নাম Linear Programming, আর তার কিংবদন্তি অ্যালগরিদম Simplex Method — Part II-এর সব অস্ত্র (augmented matrix, row operation, pivot) সেখানে অপ্রত্যাশিত নতুন কাজে নামবে।
📓 Notebook Project¶
notebooks/part-02/ch04-project.ipynb — "Solution set explorer": যেকোনো সিস্টেম দিলে RREF থেকে \(\mathbf{x}^P\) ও homogeneous দিকগুলো নিজে বের করবে, random মিশ্রণে যাচাই করবে, আর 3D-তে সেট-টা এঁকে দেখাবে।